
กระทู้เดิมที่ต้องอ่านก่อน
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #1
http://ppantip.com/topic/35228265
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #2
http://ppantip.com/topic/35233329
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #3
http://ppantip.com/topic/35237413
การสร้างวงจรขับ motor สำหรับ การถ่ายภาพดาราศาสตร์,high accuracy motor driver for star tracker
http://ppantip.com/topic/35222366
การใช้งานวงจรขับ และอุปกรณ์ตามดาวแบบติดมอเตอร์เบื้องต้น Basic Motor Drive Barn Door Tracker
http://ppantip.com/topic/35244410
การใช้งาน Motor Driver สำหรับ Star Tracker
ในตอนนี้จะมาพูดเราเรื่องการใช้งานวงจรขับมอเตอร์และวิธีคำนวน
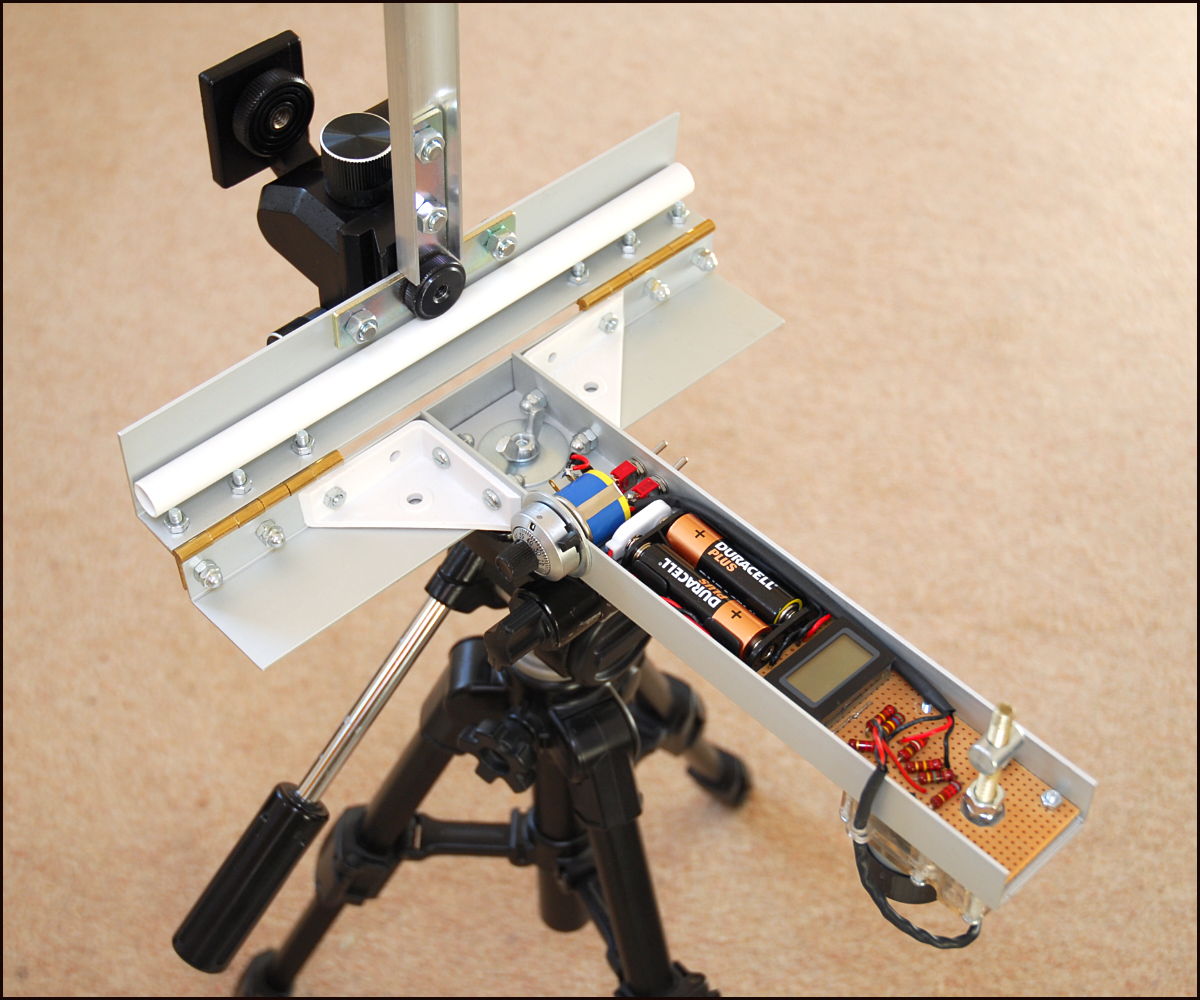
ส่วน Barndoor เราสามารถหาแบบของ Barn Door Mount ได้มากมายจากใน Internet ตัวอย่างที่ดีมากๆ
จากใน Internet อยากแนะนำคือ K2 ในรูป
 https://www.liverpool.ac.uk/~sdb/Astro/K2/
https://www.liverpool.ac.uk/~sdb/Astro/K2/
เพราะ เรียบง่าย ถอดได้ และเบา อย่างไรก็ตามยังใช้ DC Motor แบบ high precision ซึงค่อนข้างแพง และปรับยาก เราจึงควรปรับปรุงนิดหน่อยโดยเราอาจเอาเฉพาะโครงสร้าง แต่เปลี่ยนเป็น Stepper Motor และวงจรขับซะ
Stepper Motor คืออะไรต่างกะมอเตอร์ธรรมดาตรงไหน
มอเตอร์ธรรมดาเสียบปลั๊กก็หมุน และหมุนเนียนๆเช่นพัดลม รถของเล่น
แต่ stepper motor จะเดินเหมือนคนชักกระตุก คือหมุนขยับไปทีละช่วงๆ ไม่มีกึ่งๆกลางๆ ดังนั้นมันจะขยับไปตรงตำแหน่งที่แน่นอน ตลอด เราเรียกระยะที่ขยับว่า step (อย่างไรก็ตามเราสามารถใช้เทคนิคทำให้เดินทีละครึ่งได้เรียกว่า Half step)
ส่วนใครยังไม่ได้อ่านวิธีสร้าง Barndoor และควรกลับไปอ่านมาใหม่นะครับ
 http://ppantip.com/topic/35228265
http://ppantip.com/topic/35228265
เพราะถ้าไม่เข้าใจก็จะใช้ไม่ได้อยู่ดี และเอาความรู้ที่ได้มาประยุกต์ใช้งาน
และวงจร
 http://ppantip.com/topic/35222366
http://ppantip.com/topic/35222366
สมมุติว่าเรา ทำวงจรเราเสร็จแล้ว สมมุติอีกว่าเราไปซื้อมอเตอร์แบบนี้มาแถมวงจร Driver มาด้วย แรกๆผมก็ใช้ตัวนี้แหละถูกดีตรงตามข้อกำหนดผมคือทั้งหมดทุกอย่างไม่เกิน500-1000 มันใช้ได้ถ้ารู้หลักการ แม้ขนาดเท่าขี้ตาแมว

ข้อดีของมอเตอร์เล็กคือ กินไฟน้อยและไม่สั่น เวลาซื้อหาที่มีการทดรอบนะครับ ไม่งั้นไม่มีแรงเลย แต่ข้อเสียตัวเล็กๆคือไม่ค่อยมีแรง
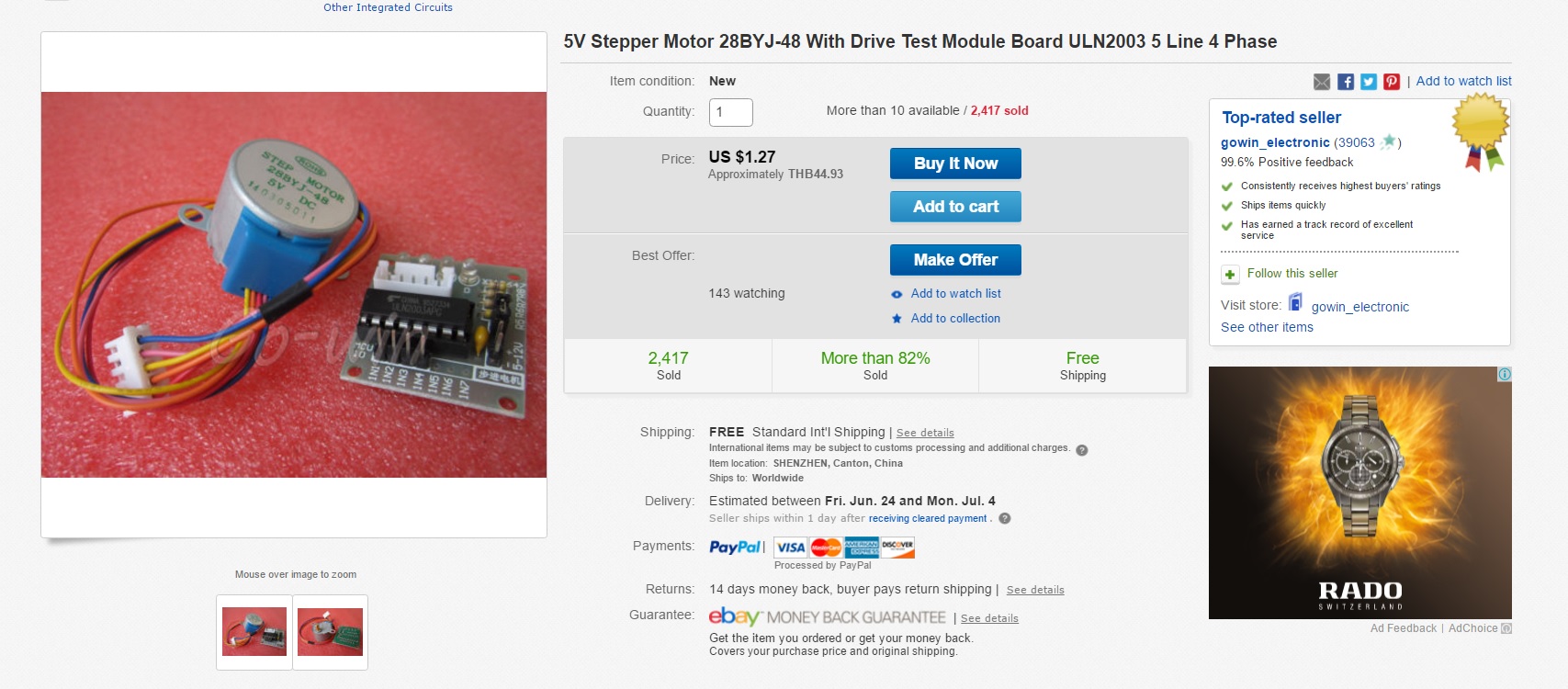
ทีนี้มาดู spec ที่ระบุ
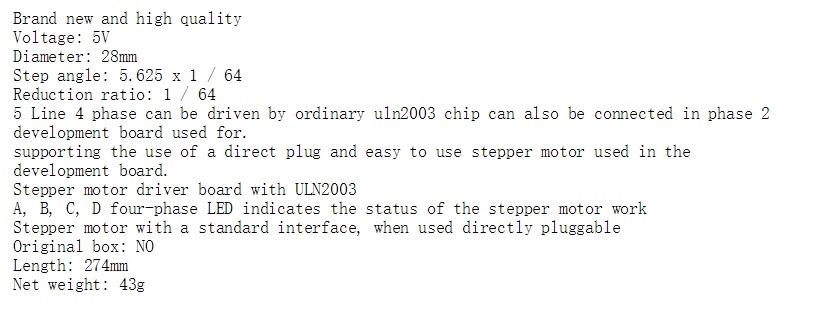
วงจรเราออกแบบที่ 5V หามอเตอร์ 5V ไว้สบายก่อน มันบอกว่า
Step angle = 5.625 x1/64 คือ เคลื่อนที่ไป step ละ 5.625 หรือ 1/64 ของรอบ (แต่จริงๆอันนี้พี่จีนโม้ ลองแล้ว คือ 11.25 1/32 ที่เขียนคือ Half Step ดูน้อยๆจะได้ขายง่าย)
Reduction Ratio = 64 คือ มีเพืองทดในตัว 1/64 คือ Stepper หมุนไป 64 รอบข้างใน ตรงเพลาด้านนอกหมุนไป 1 รอบ
มีสาย 5 เส้น เสียบไป บนบอร์เลย ตรง Socket ขาวๆ
กลับมาที่ การคำนวนเดิมๆของเรา ใครจำไม่ได้กลับไปอ่านกระทู้เดิมนะครับ
อย่าลืมหากเปลี่ยนเกลียวขับวัดระยะใหม่ด้วยครับ

เราเพิ่มส่วนมอเตอร์มาหน่อย
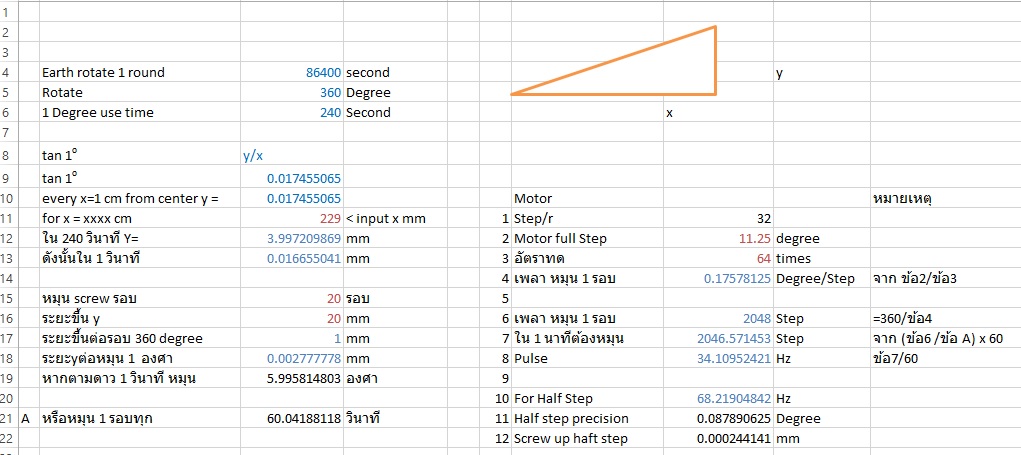
หรือเราต้องใช้ pulse 34.1 HZ หรือหากเราเลือก เป็น Half step ก็ใช้ 68.2 Hz
เราจะใช้ความยาวเท่าไรก็ได้ครับเพราะพอมาเป็น Motor Drive เราไม่กังวลแล้วว่า 1 รอบต้อง 1 นาทีพอดี ยากได้ความยาวเท่าไรก็แทนค่าเดิม 229 ได้เลยแล้วคำนวนใหม่ว่าต้องใช้กี่ Hz
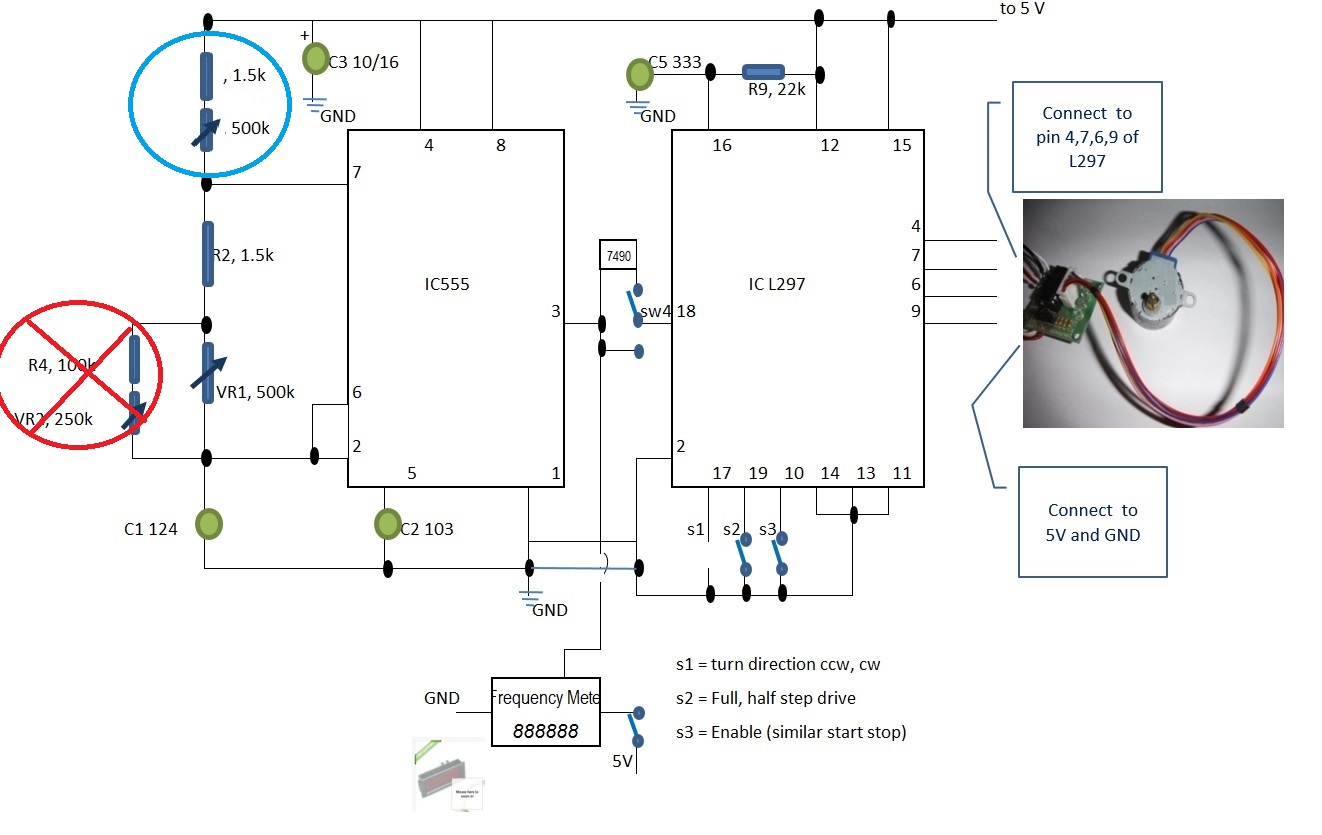
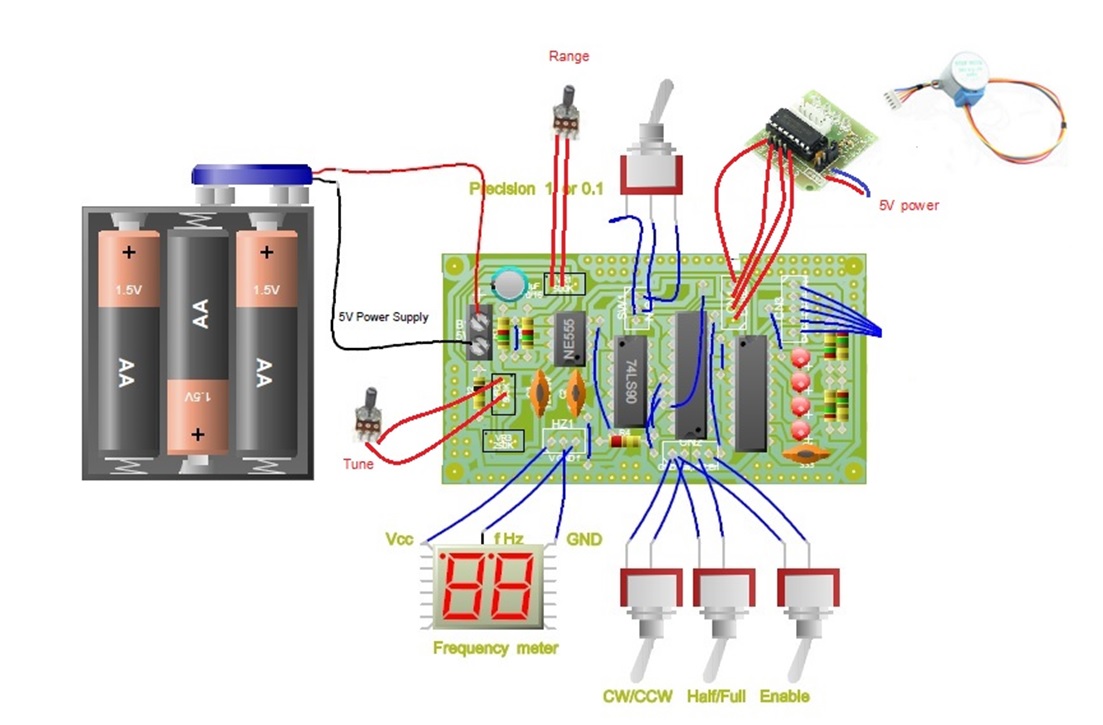
มาดูวงจรที่ให้ไปครับ
หลังจากใช้มาพบว่า R1 หากเปลี่ยนเป็น VR ดูจะทำงานได้ดีกว่า และ R4 ดูเหมือนใช้ได้น้อยและคนใช้จะงง
ที่ R1 จะเปลี่ยนเป็น
(ได้ยินเสียงบ่นแว่วๆ ว่าจะมาบอกอะไรตอนนี้ ไม่บอกกระทู้ที่แล้ว
บอกคำเดียวว่าลืมครับ

และกระทู้เก่าไม่มีเนื้อที่แก้แล้ว)
สวนวงจรก็อาจจะงงนิดหน่อยครับเพราะชื่อไม่ตรงกันเนื่องจากใช้โปรแกรมอันอื่นทำมันกำหนดชื่อเอง

โครงสร้างวงจร>ลายวงจร
VR1 > VR2
VR2 > VR3 (ยกเลิก)
R1>VR1 ที่เพิ่มเติม
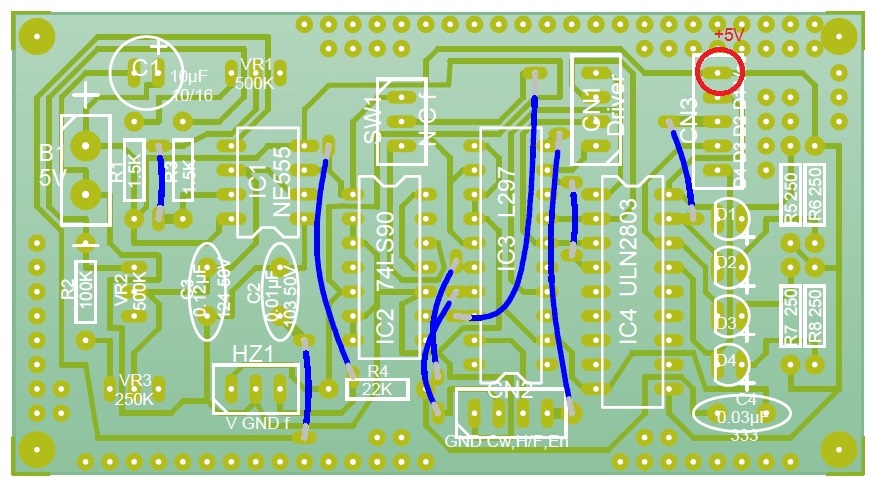
ส่วนในวงกลมแดง คือ Driver Motor 4 phases ตัดออกหากใช้สำเร็จรูปจากภายนอก แต่สาย Jump สีน้ำเงินต้องมีครับเดียววงจรไม่ครบ
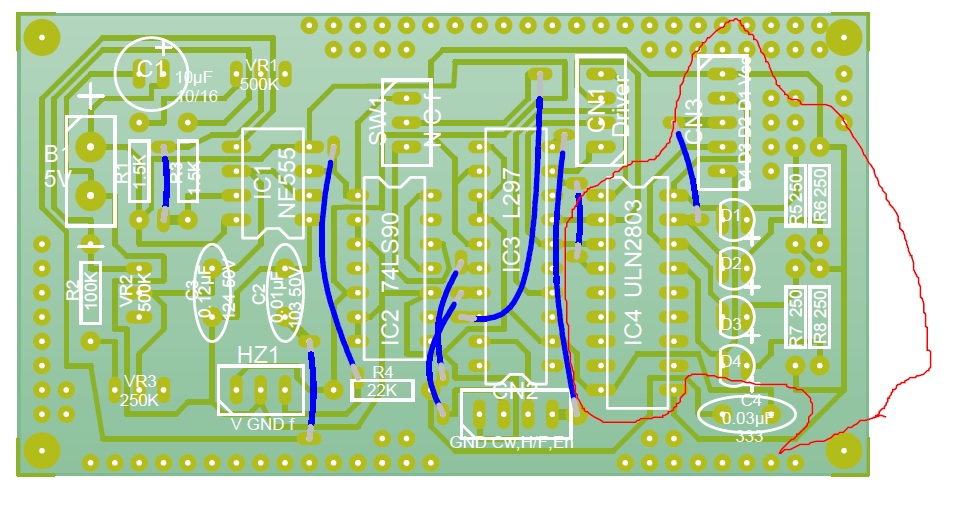
แต่หากไม่ต้องการให้รุงรังมี driver ห้อยข้างนอกก็ใส่อุปกรณ์ให้ครบ อย่าลืมอย่าเชื่อม VR ในวงจรให้เชื่อมเป็นสายเพราะต้องลากออกมาติดที่กล่อง
การต่อมอเตอร์หากอุปกรณ์ครบ ตามวงจร
ในวงจรตำแหน่งสีแดงคือไฟบวก
หากเลือกใช้ Motor แบบนี้สายไฟบวกต้องต่อให้ตรง ในรูปคือเส้นสีแดง
 ต่อให้ถูก ควรศึกษาก่อนว่าเส้นไหนเป็นอะไรไม่งั้นวงจรจะพังได้
กรณีซื้อพร้อม Driver
ต่อให้ถูก ควรศึกษาก่อนว่าเส้นไหนเป็นอะไรไม่งั้นวงจรจะพังได้
กรณีซื้อพร้อม Driver
อย่าลืมต่อไฟเลี้ยงด้วยนะครับ
กรณี 2 phases motor

จากการที่วงจรออกแบบให้ใช้ในช่วงความถี่ต่ำๆเป็นหลัก ดังนั้นในช่วงที่เกิน 400 Hz จะเริ่มปรับยาก (เพราะไม่ใช่เป้าหมาย แต่หากจะทำลองเปลี่ยน VR) แต่หากใครต้องการปรับให้ลองเปลี่ยน VR เป็นแบบนี้แทน เพราะแทนที่จะหมุนทั้งช่วงแค่ครึ่งรอบก็จะเป็น 20-30 รอบแทน

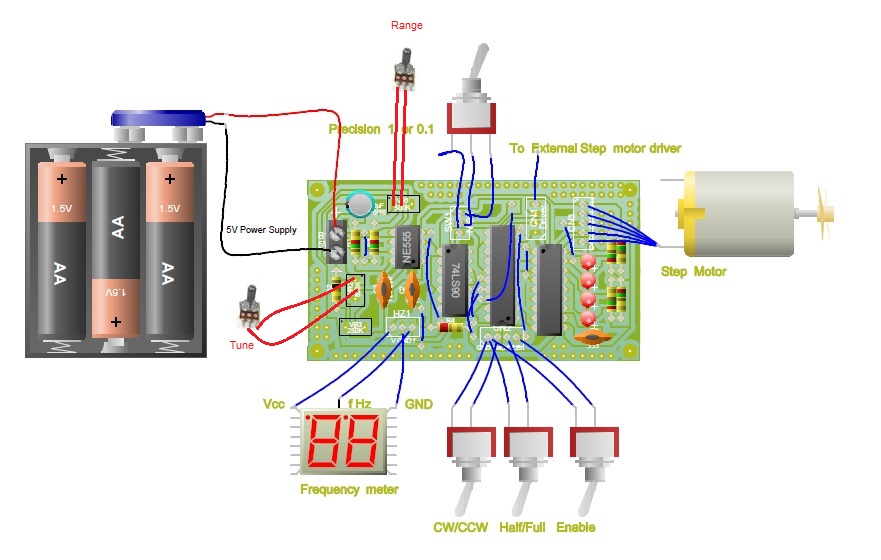
หลังจากเราประกอบลงกล่องเสร็จ

อาจทำเต้าหรือแจ๊กเสียบ ผมต่อสายออกมาแทนเพราะต่อมอเตอร์โดยตรง อย่าลืมเอาสาย power ออกมาด้วยครับ แล้วจำให้ดีเองนะครับอันไหนเป็นอันไหน
ต่อ Motor ตามที่ระบุข้างต้น
การปรับ
1 เลือกก่อนว่า SW1 (1 Hz or 0.1 HZ) เลือก 1 Hz (สัญญาณไม่ผ่าน IC 74LS90)
2 เลือก Enable off
3 เลือก Half หรือ Full
4 เลือก ทิศทาง CW/CCW
5 ปรับ VR2 Tune (ในลายวงจร) ให้สุดสังเกตตัวเลขจะเยอะขึ้น (หากน้อยลงปิกก่อนสลับขา VR ซากซ้ายไปขวา หรือขวามาซ้าย)
6 ปรับ VR1 Range ให้ช่วงเหมาะสมเช่นหากเราใช้ 34.1 Hz ก็ปรับซัก 100
7 หมุน VR2 จนได้ค่าต้องการแค่ 34 ก็พอ (หากใช้ Half step สังเกตจากจะหมุนเบาลงเคลื่อนน้อยลง ก็ต้องเป็น 68 )
8 ไปลองกับตัวตามดาวตั้งขาหาดาวเหนือเรียบร้อย เปิด Live view ส่องหาดาวสว่างๆ เปิดสวิทช์ Enable เพื่อให้มอเตอร์เริ่มหมุน หากดาวถอยหลังแสดงว่าเร็วไปลด Hzลง หากดาวแซงก็เพิ่ม Hz ขึ้น พอได้ค่าจดติดตามดาวไว้เลยครับไว้เลยครับ ควรทำตอนอยู่บ้านครับเพราะกว่าจะพอดีเสียเวลา ไปถ่ายจริงยกตั้งหมุนไปตรง Hz นี้เลยจบ
9 กรณีรู้สึกว่ามันยังขาดๆเกินๆนิดๆ เราก็ปรับ SW4 มาที่ 0.1 Hz แทน (เราจะเห็นเลยว่ามอเตอร์ลดความเร็วฮวบ หากสับแล้วเร็วขึ้นหรือ motor หวีด แสดงว่าตอนแรกเป็น 0.1 อยู่แล้ว) ทีนี้หากเราอยากได้ 34.1 ก็หมุนไปเป็น 341 ตัวสุดท้ายคือทศนิยม
อาจหมุนเป็นค่าอื่นเช่น 345แล้วดูที่ดาว
กรณีที่มิเตอร์ไม่นิ่งเช่นมันโดดไปมาระหว่าสองค่าก็พยายามปรับให้มันโดดไปมาช่วงพอๆกันเราก็หารใช้ค่ากลาง
ในทางปฏิบัตินี่อยากมากที่จะใช้ครับ
ปัญหาที่มักพบ
motor ปกติหมุนตอนติดกล้องไม่หมุน
- น้ำหนักกล้องกดทับกล้องหนักเกิน อย่างที่บอกครับ แม้แต่ motor เล็กๆก็ยกกล้อง หลายกิโลไหวแค่ถ่วงน้ำหนัก

การแก้ไข
ให้ทำคานยึดฝายืดออกมา โดยสะดวกสุดคือเหล็กเจาะรู เพราะเราจะเลื่อนไปแขวนตรงไหนก็ได้ตามน้ำหนักกล้อง ส่วน น้ำหนักถ่วง ก็อะไรก็ได้ง่ายสุดคือขวดน้ำสองขวดใส่ให้เต็มขวดหนึ่งอีกขวดว่างหากหนักมากไป ก็เทเก็บในอีกขวด จนกล้องเริ่มขยับขึ้นแต่ต้องให้เอาน้ำแกหน่อยเพราะเราไม่ต้องการให้มันขยับขึ้นเพียงแต่ลดน้ำหนักกล้อง
อีกกรณีคือกล้องมันเลยบานพับ
ก็ต้องถ่วงอีกข้าง
แค่นี้แม้แต่มอเตอร์เล็กๆก็หมุนได้สบาย
วิธีแก้ไขที่ 2 คือเปลี่ยนมอเตอร์แรงๆ แต่ก็แลกด้วยการกินไฟ อาจต้องแยกระหว่าไฟเลี้ยงวงจรกับมอเตอร์ และยังสั่นสะเทือนมากกว่า แต่สบายคือไม่ต้องมานั่งถ่วงน้ำหนัก
นอกจากนั้นอาจมาจากการตั้ง แกนมอเตอร์ไม่ตรงทำให้มันง้างแม้ว่าไม่มีอะไรมันก็ไม่หมุน แก้โดยตั้งให้เพลาขับตรง
อีกอันคือมอเตอร์มีเสียงหวีดแต่ไม่หมุน อาจเพราะเร่งความถี่มากไป ปกติมอเตอร์หมุนอย่างมากที่ สูงสุด 400-700 Hz ก็หมุนไม่ทันแล้ว
แค่นี้ก็น่าจะครบหมดทุกรื่องที่จำเป็นรู้แล้วครับ ตอนนี้หน้าฝนก็เร่งทดลองสร้างครับ พอหน้าหนาวจะได้มีไว้ถ่ายดาวสวยๆ ไว้เอามาอวดกันนะครับ
นอกจากนั้นประโยชน์อีกอย่างคือใช้ร่วมกับ Shutter release แบบมี timer ไว้ถ่ายฝนดาวตกครับแบบ ตั้งไว้แล้วนั่งกินกาแฟได้เลย
วันนี้คงต้องพอเท่านี้ครับ

การใช้งานวงจรขับ และอุปกรณ์ตามดาวแบบติดมอเตอร์เบื้องต้น Basic Motor Drive Barn Door Tracker
กระทู้เดิมที่ต้องอ่านก่อน
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #1
http://ppantip.com/topic/35228265
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #2
http://ppantip.com/topic/35233329
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #3
http://ppantip.com/topic/35237413
การสร้างวงจรขับ motor สำหรับ การถ่ายภาพดาราศาสตร์,high accuracy motor driver for star tracker
http://ppantip.com/topic/35222366
การใช้งานวงจรขับ และอุปกรณ์ตามดาวแบบติดมอเตอร์เบื้องต้น Basic Motor Drive Barn Door Tracker
http://ppantip.com/topic/35244410
การใช้งาน Motor Driver สำหรับ Star Tracker
ในตอนนี้จะมาพูดเราเรื่องการใช้งานวงจรขับมอเตอร์และวิธีคำนวน
ส่วน Barndoor เราสามารถหาแบบของ Barn Door Mount ได้มากมายจากใน Internet ตัวอย่างที่ดีมากๆ
จากใน Internet อยากแนะนำคือ K2 ในรูป
https://www.liverpool.ac.uk/~sdb/Astro/K2/
เพราะ เรียบง่าย ถอดได้ และเบา อย่างไรก็ตามยังใช้ DC Motor แบบ high precision ซึงค่อนข้างแพง และปรับยาก เราจึงควรปรับปรุงนิดหน่อยโดยเราอาจเอาเฉพาะโครงสร้าง แต่เปลี่ยนเป็น Stepper Motor และวงจรขับซะ
Stepper Motor คืออะไรต่างกะมอเตอร์ธรรมดาตรงไหน
มอเตอร์ธรรมดาเสียบปลั๊กก็หมุน และหมุนเนียนๆเช่นพัดลม รถของเล่น
แต่ stepper motor จะเดินเหมือนคนชักกระตุก คือหมุนขยับไปทีละช่วงๆ ไม่มีกึ่งๆกลางๆ ดังนั้นมันจะขยับไปตรงตำแหน่งที่แน่นอน ตลอด เราเรียกระยะที่ขยับว่า step (อย่างไรก็ตามเราสามารถใช้เทคนิคทำให้เดินทีละครึ่งได้เรียกว่า Half step)
ส่วนใครยังไม่ได้อ่านวิธีสร้าง Barndoor และควรกลับไปอ่านมาใหม่นะครับ
http://ppantip.com/topic/35228265
เพราะถ้าไม่เข้าใจก็จะใช้ไม่ได้อยู่ดี และเอาความรู้ที่ได้มาประยุกต์ใช้งาน
และวงจร
http://ppantip.com/topic/35222366
สมมุติว่าเรา ทำวงจรเราเสร็จแล้ว สมมุติอีกว่าเราไปซื้อมอเตอร์แบบนี้มาแถมวงจร Driver มาด้วย แรกๆผมก็ใช้ตัวนี้แหละถูกดีตรงตามข้อกำหนดผมคือทั้งหมดทุกอย่างไม่เกิน500-1000 มันใช้ได้ถ้ารู้หลักการ แม้ขนาดเท่าขี้ตาแมว
ข้อดีของมอเตอร์เล็กคือ กินไฟน้อยและไม่สั่น เวลาซื้อหาที่มีการทดรอบนะครับ ไม่งั้นไม่มีแรงเลย แต่ข้อเสียตัวเล็กๆคือไม่ค่อยมีแรง
ทีนี้มาดู spec ที่ระบุ
วงจรเราออกแบบที่ 5V หามอเตอร์ 5V ไว้สบายก่อน มันบอกว่า
Step angle = 5.625 x1/64 คือ เคลื่อนที่ไป step ละ 5.625 หรือ 1/64 ของรอบ (แต่จริงๆอันนี้พี่จีนโม้ ลองแล้ว คือ 11.25 1/32 ที่เขียนคือ Half Step ดูน้อยๆจะได้ขายง่าย)
Reduction Ratio = 64 คือ มีเพืองทดในตัว 1/64 คือ Stepper หมุนไป 64 รอบข้างใน ตรงเพลาด้านนอกหมุนไป 1 รอบ
มีสาย 5 เส้น เสียบไป บนบอร์เลย ตรง Socket ขาวๆ
กลับมาที่ การคำนวนเดิมๆของเรา ใครจำไม่ได้กลับไปอ่านกระทู้เดิมนะครับ
อย่าลืมหากเปลี่ยนเกลียวขับวัดระยะใหม่ด้วยครับ
เราเพิ่มส่วนมอเตอร์มาหน่อย
หรือเราต้องใช้ pulse 34.1 HZ หรือหากเราเลือก เป็น Half step ก็ใช้ 68.2 Hz
เราจะใช้ความยาวเท่าไรก็ได้ครับเพราะพอมาเป็น Motor Drive เราไม่กังวลแล้วว่า 1 รอบต้อง 1 นาทีพอดี ยากได้ความยาวเท่าไรก็แทนค่าเดิม 229 ได้เลยแล้วคำนวนใหม่ว่าต้องใช้กี่ Hz
มาดูวงจรที่ให้ไปครับ
หลังจากใช้มาพบว่า R1 หากเปลี่ยนเป็น VR ดูจะทำงานได้ดีกว่า และ R4 ดูเหมือนใช้ได้น้อยและคนใช้จะงง
ที่ R1 จะเปลี่ยนเป็น
(ได้ยินเสียงบ่นแว่วๆ ว่าจะมาบอกอะไรตอนนี้ ไม่บอกกระทู้ที่แล้ว
สวนวงจรก็อาจจะงงนิดหน่อยครับเพราะชื่อไม่ตรงกันเนื่องจากใช้โปรแกรมอันอื่นทำมันกำหนดชื่อเอง
โครงสร้างวงจร>ลายวงจร
VR1 > VR2
VR2 > VR3 (ยกเลิก)
R1>VR1 ที่เพิ่มเติม
ส่วนในวงกลมแดง คือ Driver Motor 4 phases ตัดออกหากใช้สำเร็จรูปจากภายนอก แต่สาย Jump สีน้ำเงินต้องมีครับเดียววงจรไม่ครบ
แต่หากไม่ต้องการให้รุงรังมี driver ห้อยข้างนอกก็ใส่อุปกรณ์ให้ครบ อย่าลืมอย่าเชื่อม VR ในวงจรให้เชื่อมเป็นสายเพราะต้องลากออกมาติดที่กล่อง
การต่อมอเตอร์หากอุปกรณ์ครบ ตามวงจร
ในวงจรตำแหน่งสีแดงคือไฟบวก
หากเลือกใช้ Motor แบบนี้สายไฟบวกต้องต่อให้ตรง ในรูปคือเส้นสีแดง
ต่อให้ถูก ควรศึกษาก่อนว่าเส้นไหนเป็นอะไรไม่งั้นวงจรจะพังได้
กรณีซื้อพร้อม Driver
อย่าลืมต่อไฟเลี้ยงด้วยนะครับ
กรณี 2 phases motor
จากการที่วงจรออกแบบให้ใช้ในช่วงความถี่ต่ำๆเป็นหลัก ดังนั้นในช่วงที่เกิน 400 Hz จะเริ่มปรับยาก (เพราะไม่ใช่เป้าหมาย แต่หากจะทำลองเปลี่ยน VR) แต่หากใครต้องการปรับให้ลองเปลี่ยน VR เป็นแบบนี้แทน เพราะแทนที่จะหมุนทั้งช่วงแค่ครึ่งรอบก็จะเป็น 20-30 รอบแทน
หลังจากเราประกอบลงกล่องเสร็จ
อาจทำเต้าหรือแจ๊กเสียบ ผมต่อสายออกมาแทนเพราะต่อมอเตอร์โดยตรง อย่าลืมเอาสาย power ออกมาด้วยครับ แล้วจำให้ดีเองนะครับอันไหนเป็นอันไหน
ต่อ Motor ตามที่ระบุข้างต้น
การปรับ
1 เลือกก่อนว่า SW1 (1 Hz or 0.1 HZ) เลือก 1 Hz (สัญญาณไม่ผ่าน IC 74LS90)
2 เลือก Enable off
3 เลือก Half หรือ Full
4 เลือก ทิศทาง CW/CCW
5 ปรับ VR2 Tune (ในลายวงจร) ให้สุดสังเกตตัวเลขจะเยอะขึ้น (หากน้อยลงปิกก่อนสลับขา VR ซากซ้ายไปขวา หรือขวามาซ้าย)
6 ปรับ VR1 Range ให้ช่วงเหมาะสมเช่นหากเราใช้ 34.1 Hz ก็ปรับซัก 100
7 หมุน VR2 จนได้ค่าต้องการแค่ 34 ก็พอ (หากใช้ Half step สังเกตจากจะหมุนเบาลงเคลื่อนน้อยลง ก็ต้องเป็น 68 )
8 ไปลองกับตัวตามดาวตั้งขาหาดาวเหนือเรียบร้อย เปิด Live view ส่องหาดาวสว่างๆ เปิดสวิทช์ Enable เพื่อให้มอเตอร์เริ่มหมุน หากดาวถอยหลังแสดงว่าเร็วไปลด Hzลง หากดาวแซงก็เพิ่ม Hz ขึ้น พอได้ค่าจดติดตามดาวไว้เลยครับไว้เลยครับ ควรทำตอนอยู่บ้านครับเพราะกว่าจะพอดีเสียเวลา ไปถ่ายจริงยกตั้งหมุนไปตรง Hz นี้เลยจบ
9 กรณีรู้สึกว่ามันยังขาดๆเกินๆนิดๆ เราก็ปรับ SW4 มาที่ 0.1 Hz แทน (เราจะเห็นเลยว่ามอเตอร์ลดความเร็วฮวบ หากสับแล้วเร็วขึ้นหรือ motor หวีด แสดงว่าตอนแรกเป็น 0.1 อยู่แล้ว) ทีนี้หากเราอยากได้ 34.1 ก็หมุนไปเป็น 341 ตัวสุดท้ายคือทศนิยม
อาจหมุนเป็นค่าอื่นเช่น 345แล้วดูที่ดาว
กรณีที่มิเตอร์ไม่นิ่งเช่นมันโดดไปมาระหว่าสองค่าก็พยายามปรับให้มันโดดไปมาช่วงพอๆกันเราก็หารใช้ค่ากลาง
ในทางปฏิบัตินี่อยากมากที่จะใช้ครับ
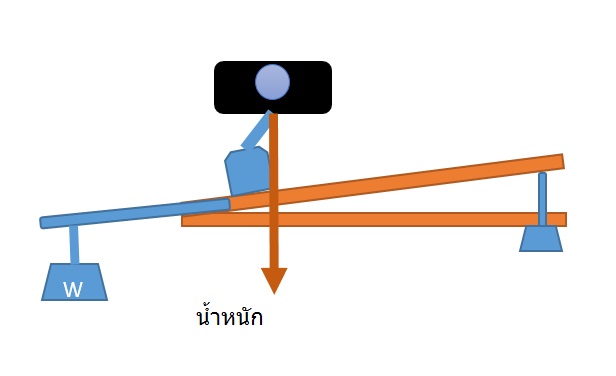
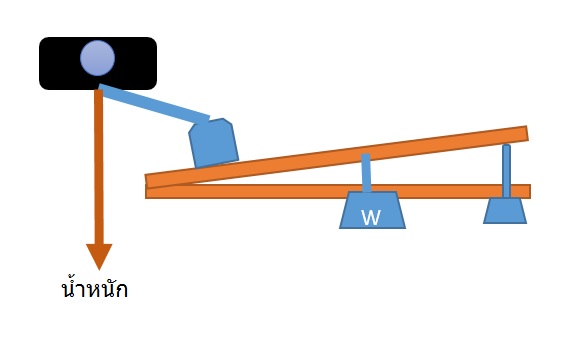
ปัญหาที่มักพบ
motor ปกติหมุนตอนติดกล้องไม่หมุน
- น้ำหนักกล้องกดทับกล้องหนักเกิน อย่างที่บอกครับ แม้แต่ motor เล็กๆก็ยกกล้อง หลายกิโลไหวแค่ถ่วงน้ำหนัก
การแก้ไข
ให้ทำคานยึดฝายืดออกมา โดยสะดวกสุดคือเหล็กเจาะรู เพราะเราจะเลื่อนไปแขวนตรงไหนก็ได้ตามน้ำหนักกล้อง ส่วน น้ำหนักถ่วง ก็อะไรก็ได้ง่ายสุดคือขวดน้ำสองขวดใส่ให้เต็มขวดหนึ่งอีกขวดว่างหากหนักมากไป ก็เทเก็บในอีกขวด จนกล้องเริ่มขยับขึ้นแต่ต้องให้เอาน้ำแกหน่อยเพราะเราไม่ต้องการให้มันขยับขึ้นเพียงแต่ลดน้ำหนักกล้อง
อีกกรณีคือกล้องมันเลยบานพับ
ก็ต้องถ่วงอีกข้าง
แค่นี้แม้แต่มอเตอร์เล็กๆก็หมุนได้สบาย
วิธีแก้ไขที่ 2 คือเปลี่ยนมอเตอร์แรงๆ แต่ก็แลกด้วยการกินไฟ อาจต้องแยกระหว่าไฟเลี้ยงวงจรกับมอเตอร์ และยังสั่นสะเทือนมากกว่า แต่สบายคือไม่ต้องมานั่งถ่วงน้ำหนัก
นอกจากนั้นอาจมาจากการตั้ง แกนมอเตอร์ไม่ตรงทำให้มันง้างแม้ว่าไม่มีอะไรมันก็ไม่หมุน แก้โดยตั้งให้เพลาขับตรง
อีกอันคือมอเตอร์มีเสียงหวีดแต่ไม่หมุน อาจเพราะเร่งความถี่มากไป ปกติมอเตอร์หมุนอย่างมากที่ สูงสุด 400-700 Hz ก็หมุนไม่ทันแล้ว
แค่นี้ก็น่าจะครบหมดทุกรื่องที่จำเป็นรู้แล้วครับ ตอนนี้หน้าฝนก็เร่งทดลองสร้างครับ พอหน้าหนาวจะได้มีไว้ถ่ายดาวสวยๆ ไว้เอามาอวดกันนะครับ
นอกจากนั้นประโยชน์อีกอย่างคือใช้ร่วมกับ Shutter release แบบมี timer ไว้ถ่ายฝนดาวตกครับแบบ ตั้งไว้แล้วนั่งกินกาแฟได้เลย
วันนี้คงต้องพอเท่านี้ครับ