สำหรับคนที่อยากจะได้ระบบตามดาวที่ดีเยี่ยมแต่มีงบจำกัดการจะไปซื้อของค่ายก็คงหลายหมื่น สิ่งที่ทำได้คือทำมันเองซะเลย ได้ทั้งสนุกและได้ความรู้ วันนี้จะมาสอนวิธีการทำ Onstep แบบใครก็ทำได้ง่ายๆ ไม่ต้องมีพื้นฐานอะไรมาก ทำจริงๆไม่ถึงชั่วโมงก็เสร็จ แต่จะอยู่ในขอบเขตพื้นฐาน(ควบคุมด้วยสาย USB หรือ Bluetooth ไม่ลงลึกไปกว่านี้)
ขอสงวนสิทธิ์ที่จะไม่ตอบอะไรมากกว่าในกระทู้นี้เท่านั้นหรือถามหลังไมค์เพิ่มเติม เมื่อไม่เข้าใจในรายละเอียดของกระทู้เท่านั้น เพราะจะเป็นกระทู้แนวทางเริ่มต้นให้ผู้สนใจแต่หากใครอยากไปเรียนรู้เพิ่มเติมก็สามารถไปศึกษาต่อได้จะแปะ Link เอาไว้ให้


เราจะไม่พูดถึงรายละเอียดปลีกย่อยของขาตามดาวหรือเรื่องดาราศาสตร์ เพราะคนจะมาอ่านจะมาทำถือว่าเข้าใจมาระดับหนึ่งแล้ว เราจะสอนทำระบบ Goto Onstep เท่านั้น ส่วนการไปทำการติดตั้งทำ Bracket, สายพาน, Pulley ต้องไปหาวิธีเอาเอง เพราะแต่ละขามันต่างกัน แต่จะแนะนำคร่าวๆ

ในสมัยหนึ่งขาตั้งกล้องดูดาวนั้นจะมีก้านหมุนเพื่อหมุนให้ดาวคงที่แต่หมุนมือมันก็ไม่นิ่งก็เลยมีคนเอามอเตอร์มาติดเพื่อสบายขึ้น ทีนี้พอติดสองแกนก็คิดว่าก็ให้มันหมุนหาบริเวณที่จะดูซะเลยสิ นั่นคือการกำเนิดของระบบ Goto แต่ยี่สิบปีก่อนถือเป็นของหรูราคาตัวหนึ่งหลักเกือบแสนคนส่วนใหญ่เลยไม่มีมีแต่ขาเอามือหมุนอย่างดีก็ติดมอเตอร์แต่ Goto ไม่ได้ ที่มันแพงเพราะแต่ละค่ายพัฒนาเอง พอไม่มีคู่แข่งมันก็เลยพัฒนาช้ามากแถมเสียทีอะไหล่ง่อยๆราคาหลักหมื่นขาตามของค่ายที่มียี่ห้อมักเป็นเช่นนี้ทุกวันนี้ก็เป็นเช่น wifi ของค่ายต่อเพิ่ม 5500 แต่ Onstep 40 บาท แต่ดันทำงานดีกว่า

จนมีนายคนหนึ่งก็เจอปัญหาเดียวกันนี้มีขาตามแบบมือหมุนจะติดระบบตามเจอราคาถึงกับหงายหลังเลยบอกตรูทำเองก็ได้ฟะ จริงๆมันก็ทำไม่ได้ยากหลักการและวิธีทำผมเคยลงกระทู้ไว้นานแล้วอยากรู้ไปดูเอง นั่นคือที่มาของ Onstep ไม่ต่างกับ Android ในโลกดาราศาสตร์ Open source แจกฟรีช่วยกันทำจนตอนนี้มันล้ำหน้ากว่าของค่ายทุกค่ายไปเยอะละแถมพี่จีนที่ออกขาตามมาใหม่ๆใช้ Onstep หมดเลยเพราะของดีไม่เสียตังค์ไม่ต้องเสียเวลามาพัฒนา แล้วปัจจุบัน Microcontroller ที่เหมือนคอมพิวเตอร์จิ๋วๆทั้งแรงและมีทุกอย่างในตัวใช้ก็ง่ายมัยเลยทำให้เรื่องพวกนี้ง่ายกว่าเดิมอีก
จริงๆหลักการมันก็หมูๆ แค่เรารู้ว่าดาวมันอยู่ตรงไหน RA Dec เท่าไรก็สั่งมอเตอร์หมุนไปตรงนั้นทำได้ถ้า รู้ตำแหน่งโดยใช้ Stepper มอเตอร์ หรือ Encoder แต่ช่างหัวมันเถอะเราแค่จะเอามาใช้เหมือนกินมาม่า ใส่น้ำร้อนแล้วกินไม่ต้องรู้หรอกมาม่ามันทำมาได้ยังไง
Onstep มีหลากหลายมากๆทำงานได้เหมือนกันหมดแต่เนื่องจากมัน Compatible สารพัด Microcontroller มันเลยจับไปใส่อะไรก็ได้ วันนี้จะทำบนบอร์ด Wemos D1 R32 และ CNC Shield V3 เพราะมันง่ายมาก ถูก ดี มี Blutooth
หมายเหตุ หลังจากนี้ไปถ้าบอกให้ใช้อะไร รุ่นไหน เวอร์ชั่นอะไรให้ทำตามทุกประการ ล้าน % ห้ามแหวกแนว เพราะในโลกของ Microcontroller นั้นมันมาสารพัดบอร์ด สารพัดคนผลิต สารพัดรุ่น ชิป สารพัด IDE เวอร์ชั่น สารพัด Library หากเราคูณกันเข้าไปมันจะมีเป็นพันเป็นหมื่นแบบได้พอมีปัญหาผมก็ขี้เกียจมาตอบมาแก้ทีละข้อ เพราะมันต้องปัญหามีอยู่แล้ว 55 ใช้ได้ไหม ได้ แต่ต้องแก้ปัญหาเองนะครับ มาถามผมผมก็งงว่าอันไหนเป็นอันไหน

สี่งที่ต้องมี
1) บอร์ด Micro Controller Unit (MCU) WeMos D1 R32 1 อัน (อย่าพลาดไปซื้อ ESP8266 หรือ Arduino Uno R3 เพราะมันเหมือนกันมากๆๆๆ) ให้ดูตามรูปที่ลงมั้งหน้าตาตำแหน่งชิป ราคาร้อยต้นๆแค่นั้น แต่หาซื้อทั้งชุดกับชิ้นที่สองเลยอาจถูกกว่าประมาณ 145 บาท หาหัว USB แบบ USB B ถ้ามีจะทนกว่าพวก micro หรือ C พวกนั้นไปใช้งานจริงไม่นานหัก ถ้าพลาดซื้อมาแล้วก็ดามหัวมันซะให้มันอยู่ในช่องที่จำกัด ไม่เช่นนั้นขยับสายง้างครั้งเดียวหักทันที ดูดีๆบางบอร์ดก็ทำเลียนแบบมาโลโก้อะไรจะไม่ชัด

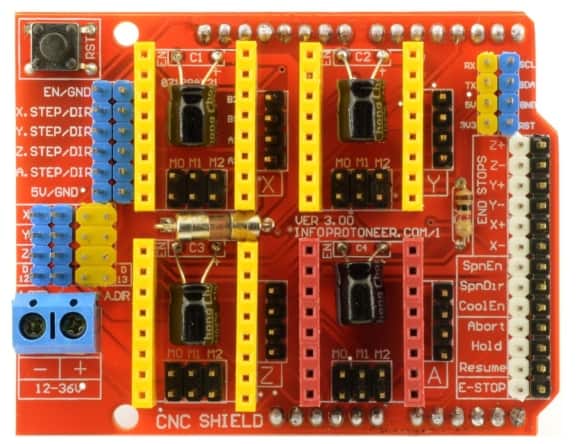
2) บอร์ด CNC Shiled V3 1 อัน (อย่าพลาดซื้อ V4 มานะ) ราคาสามสิบ
3) Stepper Motor Nema 17 ชนิด 1.8 องศา 2 ตัว สำหรับแกน RA และ Dec แกน (ใครจะทำตามดาวแบบแกนเดียวก็ซื้อตัวเดียว)ราคาขึ้นลงๆ ระวัง Stepper Nema 17 นั้นมันมีหลายขนาดยิ่งบางสั้นยิ่งถูกแรงยิ่งน้อยกินไฟน้อย ยิ่งยาวยิ่งแพงแรงบิดแยะกินไฟเยอะ เลือกเอาว่าขนาดขาตามเราใหญ่ขนาดไหน Load ขนาดไหน ถ้าคิดไม่ออกก็เอา 17HS8401s มาก็ได้ หรือถ้าขาตามไม่ใหญ่มาก 17HS4401 ก็ได้

หมายเหตุ: Stepper motor คือมอเตอร์ที่จะเคลื่อนที่เป็นขั้นทีละนิดไม่ได้หมุมเหมือนมอเตอร์พัดลม ถ้าสั่งให้เคลื่อนที่ 1 ครั้งก็จะเคลื่อนไปแค่ 1 ขั้น หรือถ้ามอเตอร์แบบ 1.8 องศาก็จะเลื่อนไปแค่ 1.8องศาต่อการสั่งหนึ่งครั้ง ถ้าจะให้หมุนรอบก็ต้องสั่งมัน 360/1.8=200ครั้ง
4) LV8729 2 ตัว สำหรับ สองแกน (ใครจะทำตามดาวแบบแกนเดียวก็ซื้อตัวเดียว)

5) สาย ไฟปลั๊กหัว 5.5x2.5 เอาไว้ต่อแบต
มีแค่นี้แหละหลักๆ ทำงานได้แล้ว
ที่เหลือเป็น Option แล้วแต่ระบบ
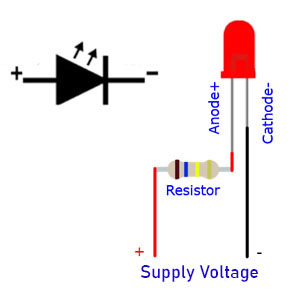
6) หลอด LED พร้อม R 200โอมห์-1K
7) Buzze r 3.3v ชนิด Active

8) สาย USB
9) Bracket แล้วแต่ชนิดขา
10) สายพานวง timing 2gt 6mm และ Pulley timing 2gt 6mm ยาว แล้วแต่ชนิดขาและการออกแบบ สานพานต้องซื้อสุดท้ายหลังจากติดตั้งและวัดขนาด


เริ่มทำกัน

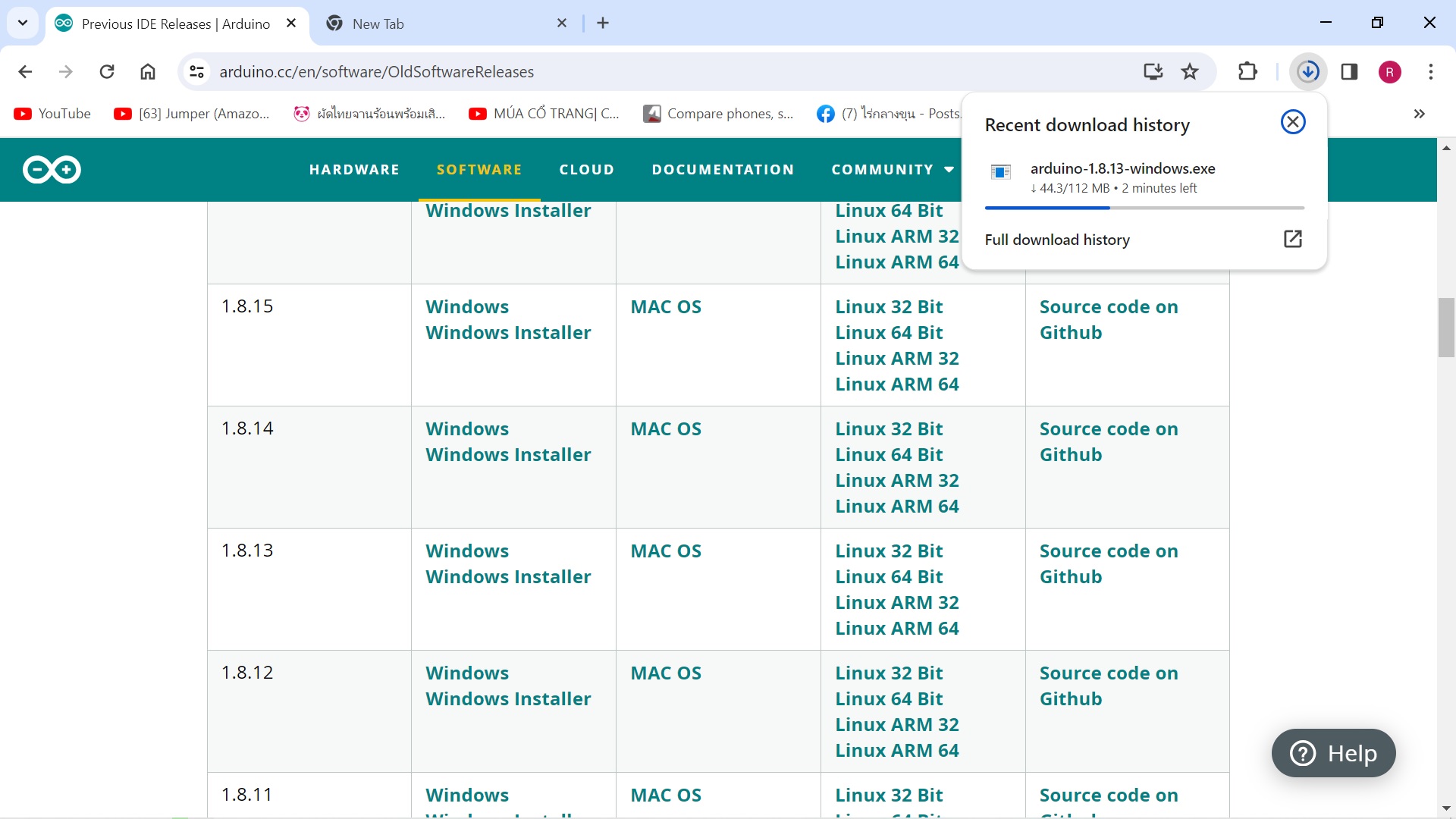
1) ไป load โปรแกรม Arduino IDE 1.8.13 มา ตาม Address ในรูปทำตามรูป (จริงๆเวอร์ชั่นไหนก็น่าจะได้แต่เอาอันนี้แหละเดี๋ยวหน้าตาไม่เหมือน)
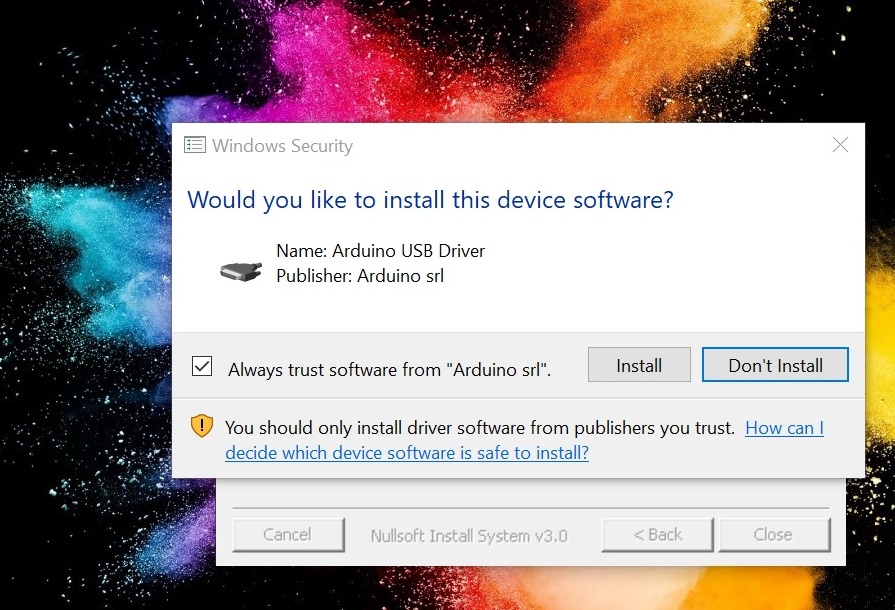
2) มันให้ลง USB Driver ก็ Install ไปเลือก Install นะ
3) ลงเสร็จเปิดโปรแกรม Arduino IDE ออกมา ไปที่ File > Preference จะเห็น Sketchbook Location เปลี่ยนที่ได้ ตอนนี้เป็น C:\Arduino
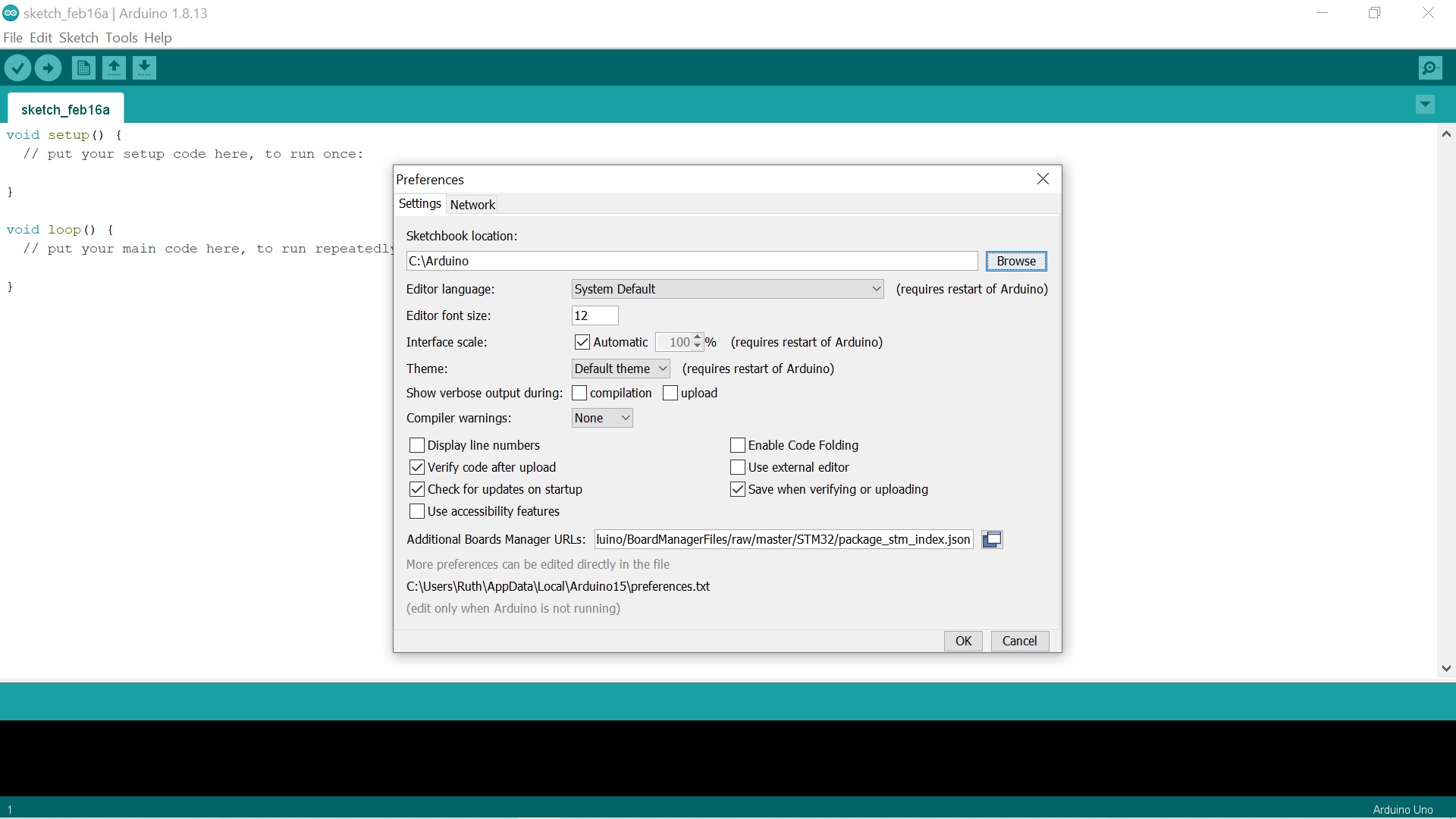
ไปที่ Additional Boards Manager URLs: ลบทิ้งให้หมดแล้วใส่อันนี้ไปแทน( Copy Text ข้างบนใส่ใน Preference อย่าลืมลมอันเดิมออกใช้ Ctrl+c และ Ctrl+v ในการ Copy Paste Copy) Paste
http://arduino.esp8266.com/stable/package_esp8266com_index.json,https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/stm32duino/BoardManagerFiles/raw/master/STM32/package_stm_index.json
ปิดโปรแกรมแล้วเปิดใหม่ คอมพิวเตอร์ต้องต่อ Net เพื่อ load ต่อไปนี้ ทำแค่ครั้งแรกครั้งเดียวนะครับเพื่อเตรียมความพร้อมของโปรแกรม
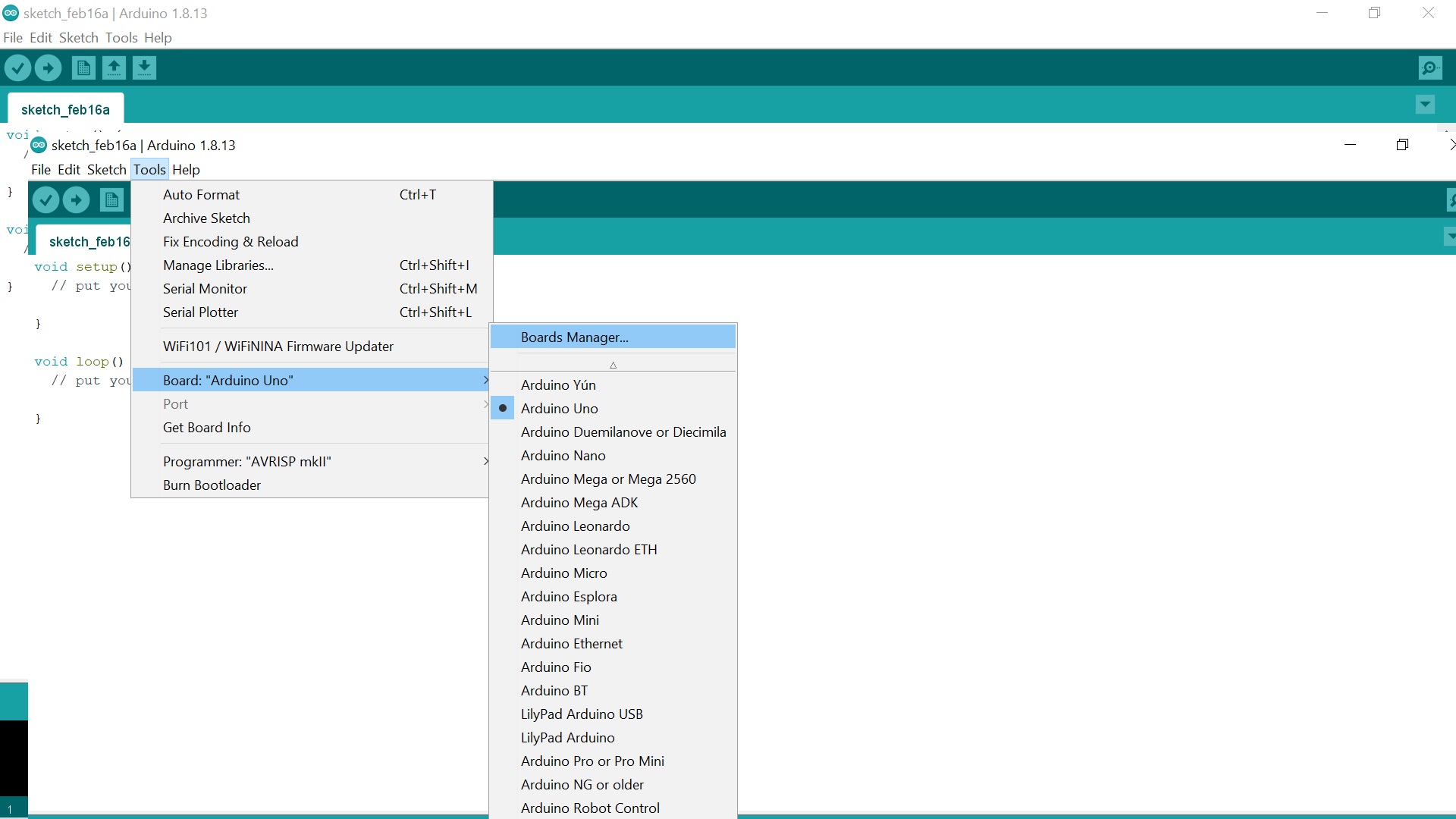
4) ไปที่ Tool > Board > Board Manager
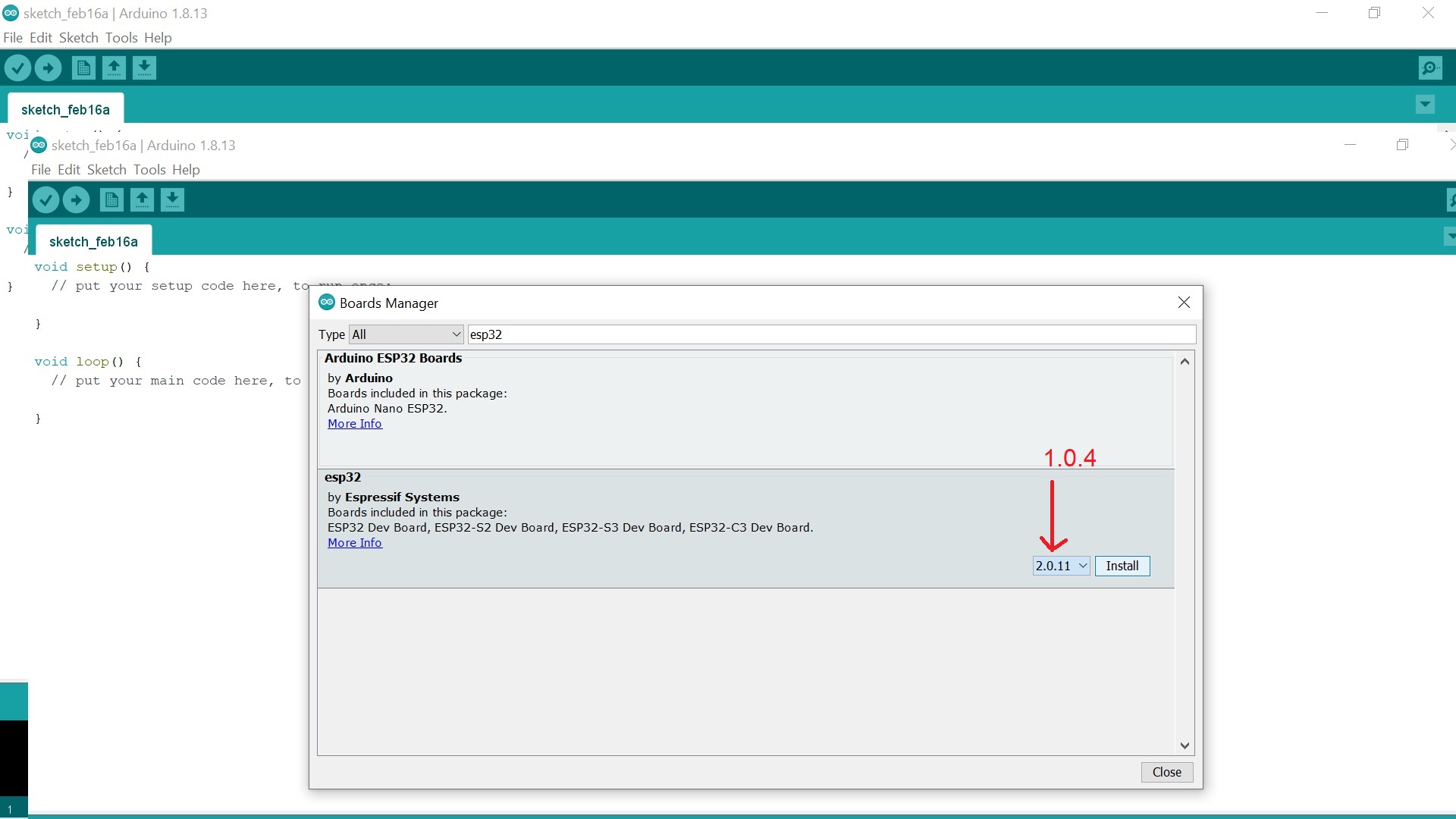
พิมพ์ ESP32 รอสักครู่รายการจะขึ้นมาเปลี่ยนเวอร์ชั่นเป็น 1.0.4 แล้วจึง Install
พิมพ์ ESP8266 เลือก Version 2.4.2 แล้ว Insttall

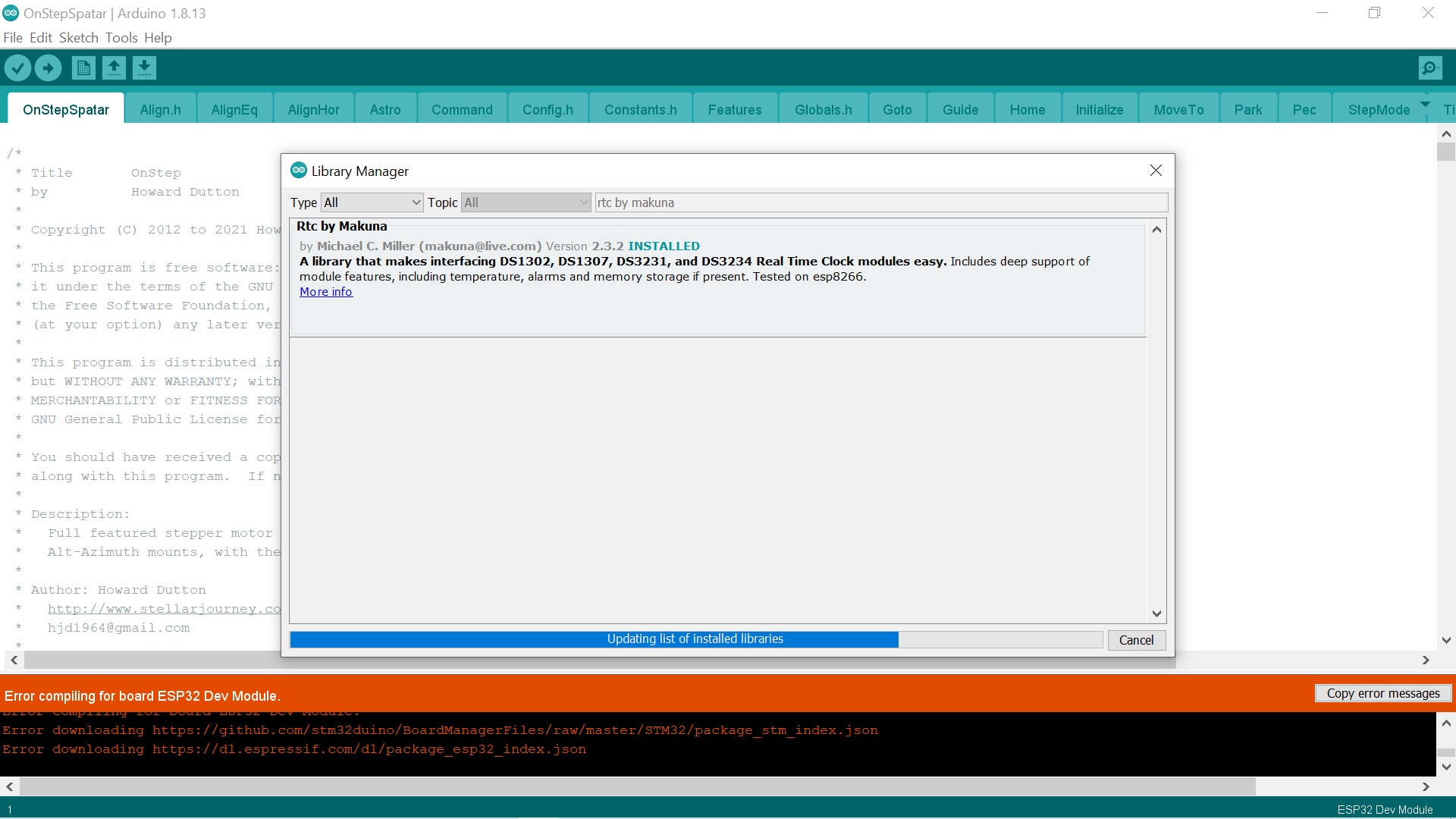
5) ไปที่ Menu Sketch>Include Library > Manage Libraries..

พิมพ์ RTC by Makuna เลือกVersion 2.3.2
6) เสร็จไปครึ่งละครับไป Load Onstep 4.24 มาจากที่นี่
https://github.com/hjd1964/OnStep
กดที่ CODE เลือก Download Zip ครับมาครบดี

ได้ Zip มาก็ระเบิดออกมา
ระวังว่าเวลาระเบิดออกมาบางที Folder มันชื่อเดียวกัน ซ้อนกันสองที ให้เอา Folder OnStep-release-4.24 ลากออกมาข้างนอกให้เหลือชั้นเดียวครับเปลี่ยนชื่อให้เหลือแค่ OnStep (ระวังตัวอักษรเล็กใหญ่) เอา Folder ไปใส่ใน Sketchbook Location ครับ C:\Arduino
เปิดโปรแกรม Arduino IDE อีกครั้ง ไปที่ File > Skatch Book จะเห็น OnStep Click เปิดออกมา
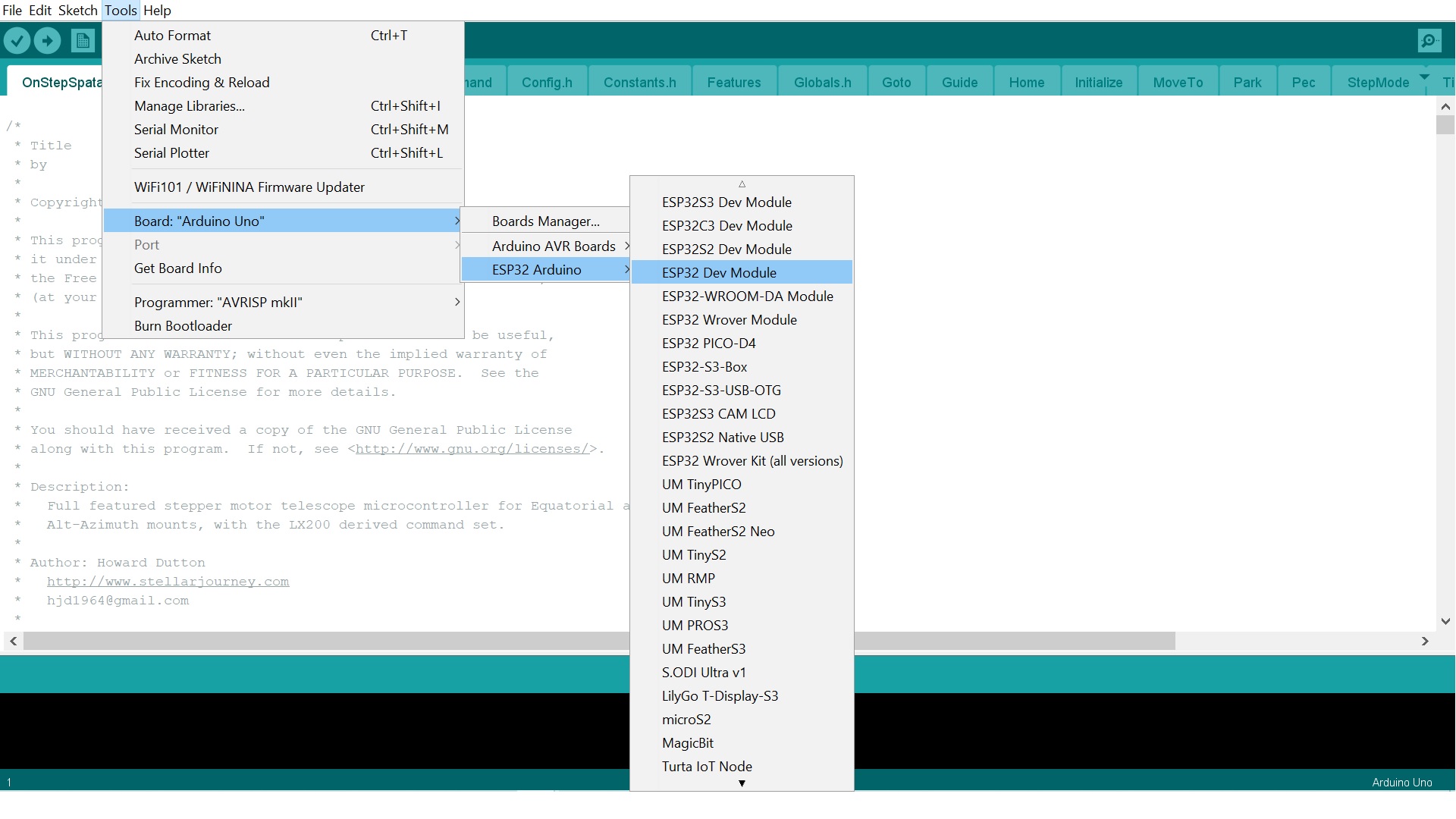
7) เลือก Tool > Board > ESP32 Arduino > ESP32 Dev Module
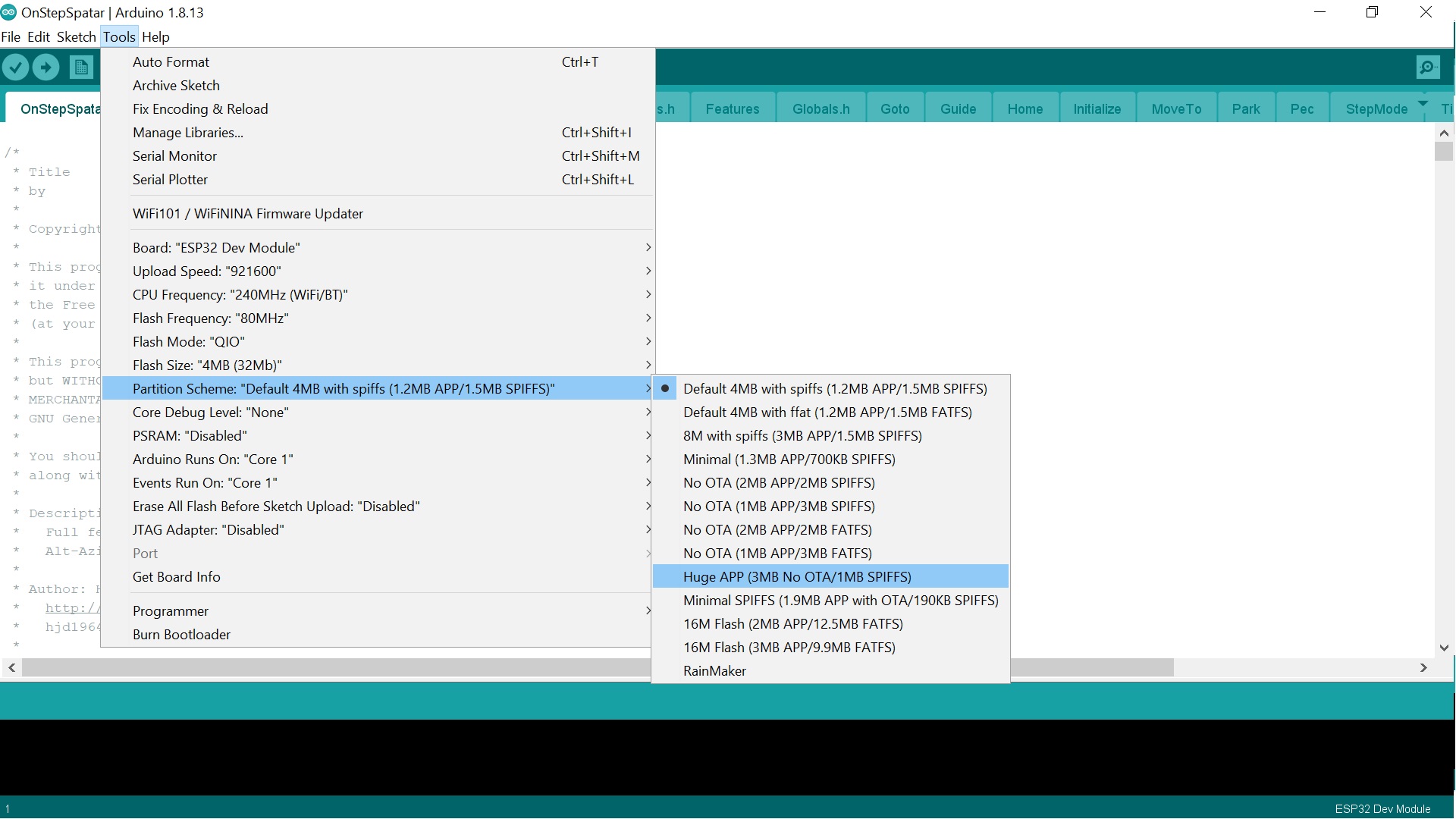
8) เลือกแต่ละหัวข้อให้เหมือนรูปข้างล่างทุกหัวข้อ ส่วน Partition Scheme เลือก Huge App (3MB No OTA/1MB SPIFFS)
9 ไปที่แถบเขียวอ่อนด้านบนหา tab
Config.h Click แก้ค่าต่างๆให้เหมือน ข้างล่าง
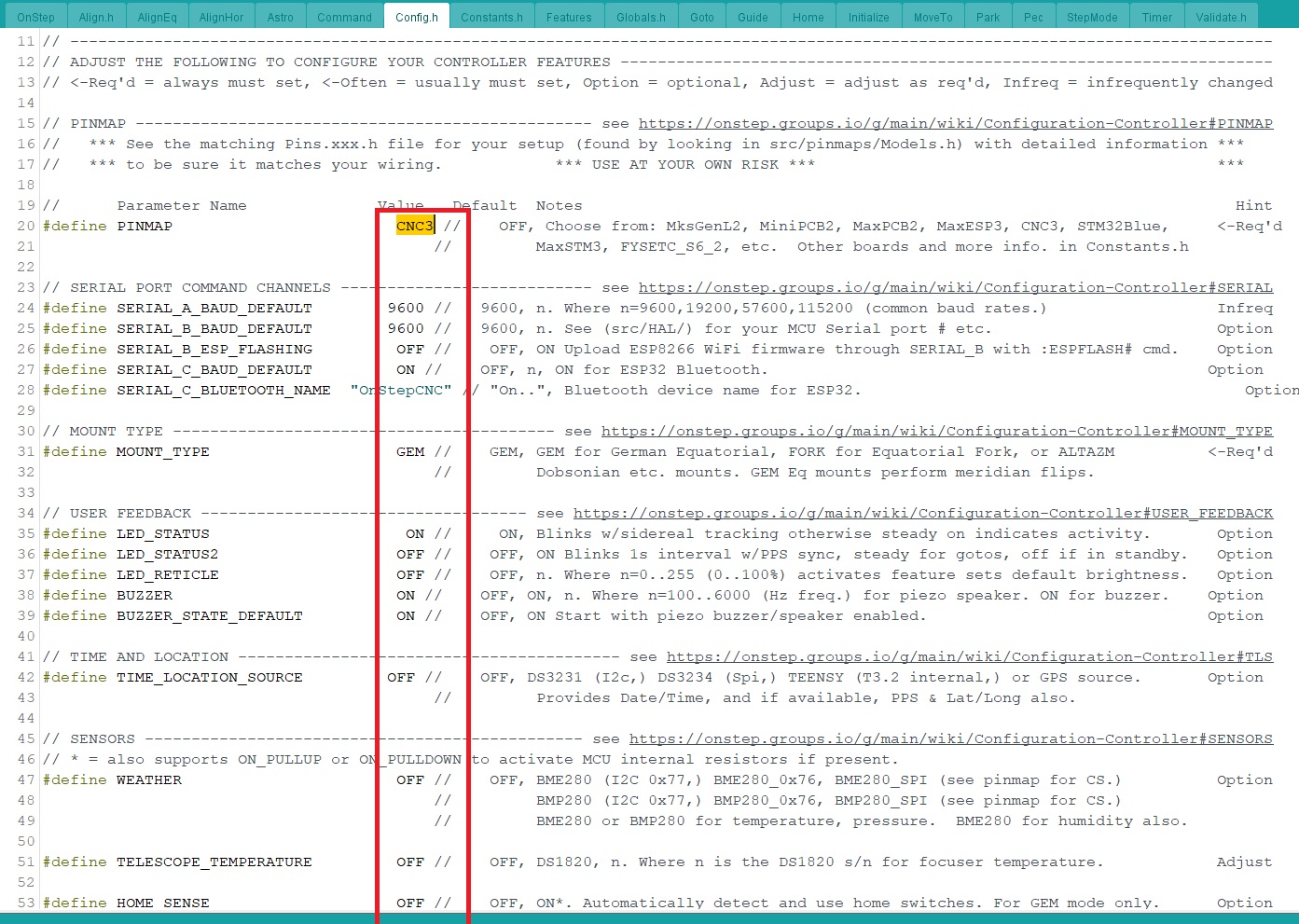
MOUNT_TYPE ก็เลือกให้ถูกถ้าเป็น EQ ก็เลือกเป็น GEM ถ้าขา Azimuth ก็ใช้ ALT/AZM ส่วนตัวผมไม่เคยใช้แบบ Azimuth ใครมีใช้ก็แก้ไขตรงนี้
ตรง “
OnstepCNC” นั่นเป็นชื่อ BlueTooth ของเราเปลี่ยนได้จะได้ไมซ้ำคนอื่น
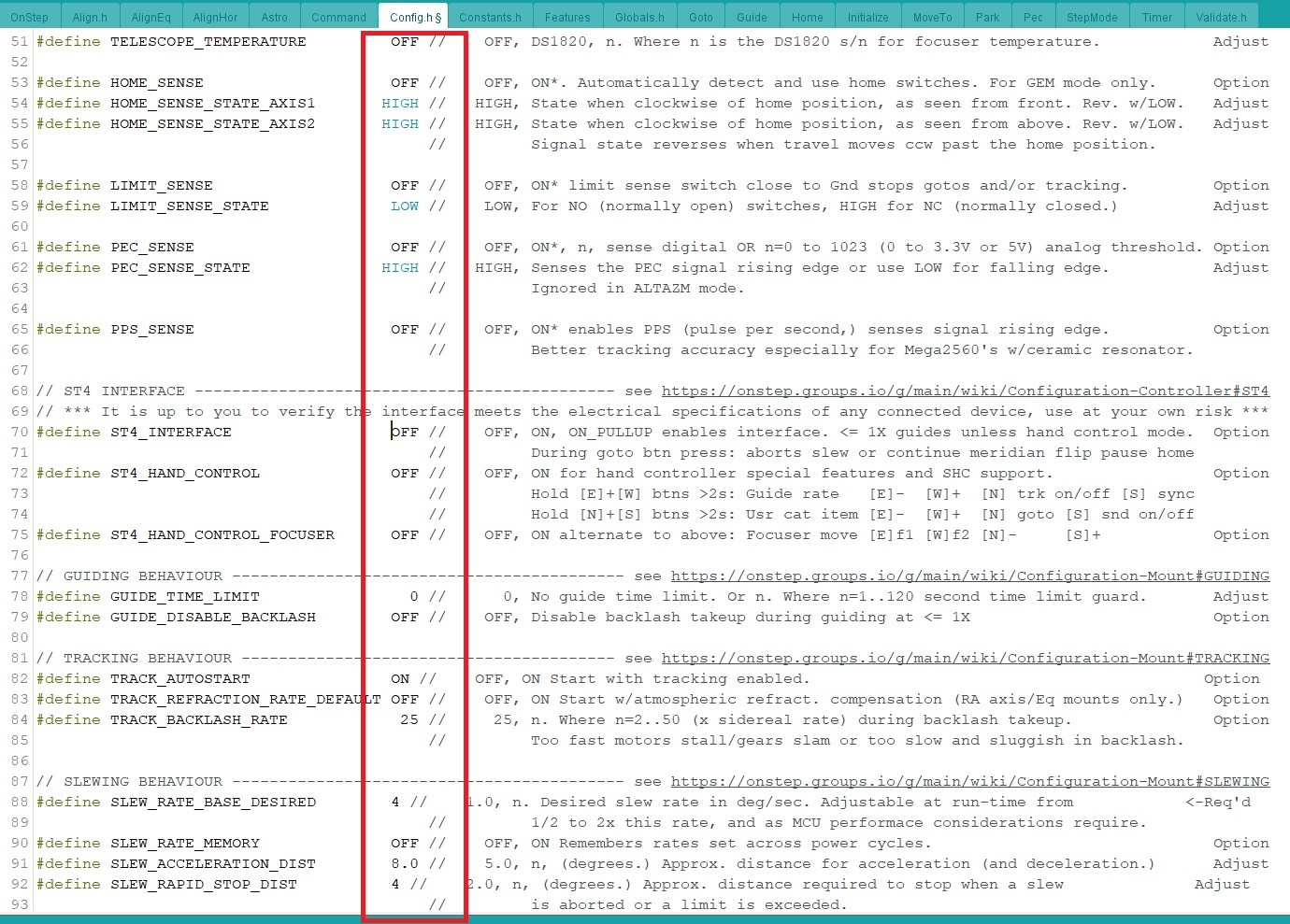
TRACK_AUTOSTART ถ้า ON มันจะ Track ดาวทันทีที่เปิดเครื่องทำให้ขาพร้อมใช้งาน ข้อเสียคือขามันจะเดินไปเรื่อยๆหากทิ้งไว้ หากไม่ชอบให้เปลี่ยนเป็น OFF ซึ่งจะนิ่งเมื่อเปิดเครื่อง แต่ต้องไปสั่ง Tracking Start เองตอนใช้ App Onstep หรือทำ Alignment ไม่เช่นนั้นสั่งอะไรมันก็ไม่ทำงาน
SLEW_RATE_BASE_DESIRED คือความเร็วในการหมุนขาตาม หน่ยเป็นองศาต่อวินาที ต้องมาเปลี่ยนเอง ทดลองเอาเอง มันขึ้นกับ Microcontroller และมอเตอร์จะทำงานทันไหม หากตั้งไม่ดีเร็วเกินมอเตอร์จะสะท้าน ถ้าน้อยเกินมันก็ช้ามาก แต่เราใช้งานจริงมันก็หมุนมักไม่ถึง 360 องศา ถ้าตั้ง 4 ก็ใช้เวลา 360/4= 90วินาที ก็รอได้ปกติ Goto หาดาวก็หมุนไปไม่กี่องศาไม่กี่วินาทีก็ถึงแล้ว การตั้งมากเกินนอกจากมอเตอร์ทำงานหนักขึ้นหรือหมุนไม่ทันมันยังทำให้ขาตามพังง่ายขึ้นถ้าอุปกรณ์กล้องดูดาวเราหนักแรงเฉื่อยจะทำให้กลไกพังเร็วขึ้น ปกติอาจลดมาเหลือ 3 หรือบางการทดของกลไกอาจต้องเหลือ 2 หรือถ้ากล้องเราใหญ่หนักมากก็ลดไปตามความเหมาะสม เดี๋ยวเราต้องมาเปลี่ยน
SLEW_RATE_MEMORY OFF มันจะตั้งกลับมาที่ Rate เดิมตลอดทุกครั้งที่เปิด แต่ถ้า ON มันจะจำค่าครั้งก่อนไว้แม้ว่าจะปิดเครื่องไปแล้วก็ตาม
SLEW_ACCELERATIOM_DIST คือระยะเร่งมอเตอร์ เป็นองศา มันจะไม่วิ่งเร็วทันทีเพราะมันจะกระชาก ถ้าตั้ง 8.0 คือมันจะค่อยๆเร่งจาก 0 จนเร็วปกติที่ 8 องศา ยิ่งน้อยยิ่งกระชาก 8.0 เหมาะแล้ว
SLEW_RAPID_STOP_DIST ก็เหมือนตอนเร่งแต่นี่ตอนจะหยุด ตั้งตามขนาดกล้องดูดาวตามเหมาะสม



ไปอ่านต่อใน เม้นท์ 1 นะ

มาทำระบบตามดาว Onstep Goto กัน
ขอสงวนสิทธิ์ที่จะไม่ตอบอะไรมากกว่าในกระทู้นี้เท่านั้นหรือถามหลังไมค์เพิ่มเติม เมื่อไม่เข้าใจในรายละเอียดของกระทู้เท่านั้น เพราะจะเป็นกระทู้แนวทางเริ่มต้นให้ผู้สนใจแต่หากใครอยากไปเรียนรู้เพิ่มเติมก็สามารถไปศึกษาต่อได้จะแปะ Link เอาไว้ให้
เราจะไม่พูดถึงรายละเอียดปลีกย่อยของขาตามดาวหรือเรื่องดาราศาสตร์ เพราะคนจะมาอ่านจะมาทำถือว่าเข้าใจมาระดับหนึ่งแล้ว เราจะสอนทำระบบ Goto Onstep เท่านั้น ส่วนการไปทำการติดตั้งทำ Bracket, สายพาน, Pulley ต้องไปหาวิธีเอาเอง เพราะแต่ละขามันต่างกัน แต่จะแนะนำคร่าวๆ
ในสมัยหนึ่งขาตั้งกล้องดูดาวนั้นจะมีก้านหมุนเพื่อหมุนให้ดาวคงที่แต่หมุนมือมันก็ไม่นิ่งก็เลยมีคนเอามอเตอร์มาติดเพื่อสบายขึ้น ทีนี้พอติดสองแกนก็คิดว่าก็ให้มันหมุนหาบริเวณที่จะดูซะเลยสิ นั่นคือการกำเนิดของระบบ Goto แต่ยี่สิบปีก่อนถือเป็นของหรูราคาตัวหนึ่งหลักเกือบแสนคนส่วนใหญ่เลยไม่มีมีแต่ขาเอามือหมุนอย่างดีก็ติดมอเตอร์แต่ Goto ไม่ได้ ที่มันแพงเพราะแต่ละค่ายพัฒนาเอง พอไม่มีคู่แข่งมันก็เลยพัฒนาช้ามากแถมเสียทีอะไหล่ง่อยๆราคาหลักหมื่นขาตามของค่ายที่มียี่ห้อมักเป็นเช่นนี้ทุกวันนี้ก็เป็นเช่น wifi ของค่ายต่อเพิ่ม 5500 แต่ Onstep 40 บาท แต่ดันทำงานดีกว่า
จนมีนายคนหนึ่งก็เจอปัญหาเดียวกันนี้มีขาตามแบบมือหมุนจะติดระบบตามเจอราคาถึงกับหงายหลังเลยบอกตรูทำเองก็ได้ฟะ จริงๆมันก็ทำไม่ได้ยากหลักการและวิธีทำผมเคยลงกระทู้ไว้นานแล้วอยากรู้ไปดูเอง นั่นคือที่มาของ Onstep ไม่ต่างกับ Android ในโลกดาราศาสตร์ Open source แจกฟรีช่วยกันทำจนตอนนี้มันล้ำหน้ากว่าของค่ายทุกค่ายไปเยอะละแถมพี่จีนที่ออกขาตามมาใหม่ๆใช้ Onstep หมดเลยเพราะของดีไม่เสียตังค์ไม่ต้องเสียเวลามาพัฒนา แล้วปัจจุบัน Microcontroller ที่เหมือนคอมพิวเตอร์จิ๋วๆทั้งแรงและมีทุกอย่างในตัวใช้ก็ง่ายมัยเลยทำให้เรื่องพวกนี้ง่ายกว่าเดิมอีก
จริงๆหลักการมันก็หมูๆ แค่เรารู้ว่าดาวมันอยู่ตรงไหน RA Dec เท่าไรก็สั่งมอเตอร์หมุนไปตรงนั้นทำได้ถ้า รู้ตำแหน่งโดยใช้ Stepper มอเตอร์ หรือ Encoder แต่ช่างหัวมันเถอะเราแค่จะเอามาใช้เหมือนกินมาม่า ใส่น้ำร้อนแล้วกินไม่ต้องรู้หรอกมาม่ามันทำมาได้ยังไง
Onstep มีหลากหลายมากๆทำงานได้เหมือนกันหมดแต่เนื่องจากมัน Compatible สารพัด Microcontroller มันเลยจับไปใส่อะไรก็ได้ วันนี้จะทำบนบอร์ด Wemos D1 R32 และ CNC Shield V3 เพราะมันง่ายมาก ถูก ดี มี Blutooth
หมายเหตุ หลังจากนี้ไปถ้าบอกให้ใช้อะไร รุ่นไหน เวอร์ชั่นอะไรให้ทำตามทุกประการ ล้าน % ห้ามแหวกแนว เพราะในโลกของ Microcontroller นั้นมันมาสารพัดบอร์ด สารพัดคนผลิต สารพัดรุ่น ชิป สารพัด IDE เวอร์ชั่น สารพัด Library หากเราคูณกันเข้าไปมันจะมีเป็นพันเป็นหมื่นแบบได้พอมีปัญหาผมก็ขี้เกียจมาตอบมาแก้ทีละข้อ เพราะมันต้องปัญหามีอยู่แล้ว 55 ใช้ได้ไหม ได้ แต่ต้องแก้ปัญหาเองนะครับ มาถามผมผมก็งงว่าอันไหนเป็นอันไหน
สี่งที่ต้องมี
1) บอร์ด Micro Controller Unit (MCU) WeMos D1 R32 1 อัน (อย่าพลาดไปซื้อ ESP8266 หรือ Arduino Uno R3 เพราะมันเหมือนกันมากๆๆๆ) ให้ดูตามรูปที่ลงมั้งหน้าตาตำแหน่งชิป ราคาร้อยต้นๆแค่นั้น แต่หาซื้อทั้งชุดกับชิ้นที่สองเลยอาจถูกกว่าประมาณ 145 บาท หาหัว USB แบบ USB B ถ้ามีจะทนกว่าพวก micro หรือ C พวกนั้นไปใช้งานจริงไม่นานหัก ถ้าพลาดซื้อมาแล้วก็ดามหัวมันซะให้มันอยู่ในช่องที่จำกัด ไม่เช่นนั้นขยับสายง้างครั้งเดียวหักทันที ดูดีๆบางบอร์ดก็ทำเลียนแบบมาโลโก้อะไรจะไม่ชัด
2) บอร์ด CNC Shiled V3 1 อัน (อย่าพลาดซื้อ V4 มานะ) ราคาสามสิบ
3) Stepper Motor Nema 17 ชนิด 1.8 องศา 2 ตัว สำหรับแกน RA และ Dec แกน (ใครจะทำตามดาวแบบแกนเดียวก็ซื้อตัวเดียว)ราคาขึ้นลงๆ ระวัง Stepper Nema 17 นั้นมันมีหลายขนาดยิ่งบางสั้นยิ่งถูกแรงยิ่งน้อยกินไฟน้อย ยิ่งยาวยิ่งแพงแรงบิดแยะกินไฟเยอะ เลือกเอาว่าขนาดขาตามเราใหญ่ขนาดไหน Load ขนาดไหน ถ้าคิดไม่ออกก็เอา 17HS8401s มาก็ได้ หรือถ้าขาตามไม่ใหญ่มาก 17HS4401 ก็ได้
หมายเหตุ: Stepper motor คือมอเตอร์ที่จะเคลื่อนที่เป็นขั้นทีละนิดไม่ได้หมุมเหมือนมอเตอร์พัดลม ถ้าสั่งให้เคลื่อนที่ 1 ครั้งก็จะเคลื่อนไปแค่ 1 ขั้น หรือถ้ามอเตอร์แบบ 1.8 องศาก็จะเลื่อนไปแค่ 1.8องศาต่อการสั่งหนึ่งครั้ง ถ้าจะให้หมุนรอบก็ต้องสั่งมัน 360/1.8=200ครั้ง
4) LV8729 2 ตัว สำหรับ สองแกน (ใครจะทำตามดาวแบบแกนเดียวก็ซื้อตัวเดียว)
5) สาย ไฟปลั๊กหัว 5.5x2.5 เอาไว้ต่อแบต
มีแค่นี้แหละหลักๆ ทำงานได้แล้ว
ที่เหลือเป็น Option แล้วแต่ระบบ
6) หลอด LED พร้อม R 200โอมห์-1K
7) Buzze r 3.3v ชนิด Active
8) สาย USB
9) Bracket แล้วแต่ชนิดขา
10) สายพานวง timing 2gt 6mm และ Pulley timing 2gt 6mm ยาว แล้วแต่ชนิดขาและการออกแบบ สานพานต้องซื้อสุดท้ายหลังจากติดตั้งและวัดขนาด
เริ่มทำกัน
1) ไป load โปรแกรม Arduino IDE 1.8.13 มา ตาม Address ในรูปทำตามรูป (จริงๆเวอร์ชั่นไหนก็น่าจะได้แต่เอาอันนี้แหละเดี๋ยวหน้าตาไม่เหมือน)
2) มันให้ลง USB Driver ก็ Install ไปเลือก Install นะ
3) ลงเสร็จเปิดโปรแกรม Arduino IDE ออกมา ไปที่ File > Preference จะเห็น Sketchbook Location เปลี่ยนที่ได้ ตอนนี้เป็น C:\Arduino
ไปที่ Additional Boards Manager URLs: ลบทิ้งให้หมดแล้วใส่อันนี้ไปแทน( Copy Text ข้างบนใส่ใน Preference อย่าลืมลมอันเดิมออกใช้ Ctrl+c และ Ctrl+v ในการ Copy Paste Copy) Paste
http://arduino.esp8266.com/stable/package_esp8266com_index.json,https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/stm32duino/BoardManagerFiles/raw/master/STM32/package_stm_index.json
ปิดโปรแกรมแล้วเปิดใหม่ คอมพิวเตอร์ต้องต่อ Net เพื่อ load ต่อไปนี้ ทำแค่ครั้งแรกครั้งเดียวนะครับเพื่อเตรียมความพร้อมของโปรแกรม
4) ไปที่ Tool > Board > Board Manager
พิมพ์ ESP32 รอสักครู่รายการจะขึ้นมาเปลี่ยนเวอร์ชั่นเป็น 1.0.4 แล้วจึง Install
พิมพ์ ESP8266 เลือก Version 2.4.2 แล้ว Insttall
5) ไปที่ Menu Sketch>Include Library > Manage Libraries..
พิมพ์ RTC by Makuna เลือกVersion 2.3.2
6) เสร็จไปครึ่งละครับไป Load Onstep 4.24 มาจากที่นี่
https://github.com/hjd1964/OnStep
กดที่ CODE เลือก Download Zip ครับมาครบดี
ได้ Zip มาก็ระเบิดออกมา ระวังว่าเวลาระเบิดออกมาบางที Folder มันชื่อเดียวกัน ซ้อนกันสองที ให้เอา Folder OnStep-release-4.24 ลากออกมาข้างนอกให้เหลือชั้นเดียวครับเปลี่ยนชื่อให้เหลือแค่ OnStep (ระวังตัวอักษรเล็กใหญ่) เอา Folder ไปใส่ใน Sketchbook Location ครับ C:\Arduino
เปิดโปรแกรม Arduino IDE อีกครั้ง ไปที่ File > Skatch Book จะเห็น OnStep Click เปิดออกมา
7) เลือก Tool > Board > ESP32 Arduino > ESP32 Dev Module
8) เลือกแต่ละหัวข้อให้เหมือนรูปข้างล่างทุกหัวข้อ ส่วน Partition Scheme เลือก Huge App (3MB No OTA/1MB SPIFFS)
9 ไปที่แถบเขียวอ่อนด้านบนหา tab Config.h Click แก้ค่าต่างๆให้เหมือน ข้างล่าง
MOUNT_TYPE ก็เลือกให้ถูกถ้าเป็น EQ ก็เลือกเป็น GEM ถ้าขา Azimuth ก็ใช้ ALT/AZM ส่วนตัวผมไม่เคยใช้แบบ Azimuth ใครมีใช้ก็แก้ไขตรงนี้
ตรง “OnstepCNC” นั่นเป็นชื่อ BlueTooth ของเราเปลี่ยนได้จะได้ไมซ้ำคนอื่น
TRACK_AUTOSTART ถ้า ON มันจะ Track ดาวทันทีที่เปิดเครื่องทำให้ขาพร้อมใช้งาน ข้อเสียคือขามันจะเดินไปเรื่อยๆหากทิ้งไว้ หากไม่ชอบให้เปลี่ยนเป็น OFF ซึ่งจะนิ่งเมื่อเปิดเครื่อง แต่ต้องไปสั่ง Tracking Start เองตอนใช้ App Onstep หรือทำ Alignment ไม่เช่นนั้นสั่งอะไรมันก็ไม่ทำงาน
SLEW_RATE_BASE_DESIRED คือความเร็วในการหมุนขาตาม หน่ยเป็นองศาต่อวินาที ต้องมาเปลี่ยนเอง ทดลองเอาเอง มันขึ้นกับ Microcontroller และมอเตอร์จะทำงานทันไหม หากตั้งไม่ดีเร็วเกินมอเตอร์จะสะท้าน ถ้าน้อยเกินมันก็ช้ามาก แต่เราใช้งานจริงมันก็หมุนมักไม่ถึง 360 องศา ถ้าตั้ง 4 ก็ใช้เวลา 360/4= 90วินาที ก็รอได้ปกติ Goto หาดาวก็หมุนไปไม่กี่องศาไม่กี่วินาทีก็ถึงแล้ว การตั้งมากเกินนอกจากมอเตอร์ทำงานหนักขึ้นหรือหมุนไม่ทันมันยังทำให้ขาตามพังง่ายขึ้นถ้าอุปกรณ์กล้องดูดาวเราหนักแรงเฉื่อยจะทำให้กลไกพังเร็วขึ้น ปกติอาจลดมาเหลือ 3 หรือบางการทดของกลไกอาจต้องเหลือ 2 หรือถ้ากล้องเราใหญ่หนักมากก็ลดไปตามความเหมาะสม เดี๋ยวเราต้องมาเปลี่ยน
SLEW_RATE_MEMORY OFF มันจะตั้งกลับมาที่ Rate เดิมตลอดทุกครั้งที่เปิด แต่ถ้า ON มันจะจำค่าครั้งก่อนไว้แม้ว่าจะปิดเครื่องไปแล้วก็ตาม
SLEW_ACCELERATIOM_DIST คือระยะเร่งมอเตอร์ เป็นองศา มันจะไม่วิ่งเร็วทันทีเพราะมันจะกระชาก ถ้าตั้ง 8.0 คือมันจะค่อยๆเร่งจาก 0 จนเร็วปกติที่ 8 องศา ยิ่งน้อยยิ่งกระชาก 8.0 เหมาะแล้ว
SLEW_RAPID_STOP_DIST ก็เหมือนตอนเร่งแต่นี่ตอนจะหยุด ตั้งตามขนาดกล้องดูดาวตามเหมาะสม
ไปอ่านต่อใน เม้นท์ 1 นะ