จากกระทู้เดิมหากใครสนใจกลับไปอ่านได้ครับ
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #1
http://ppantip.com/topic/35228265
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #2
http://ppantip.com/topic/35233329
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #3
http://ppantip.com/topic/35237413
การสร้างวงจรขับ motor สำหรับ การถ่ายภาพดาราศาสตร์,high accuracy motor driver for star tracker
http://ppantip.com/topic/35222366
การใช้งานวงจรขับ และอุปกรณ์ตามดาวแบบติดมอเตอร์เบื้องต้น Basic Motor Drive Barn Door Tracker
http://ppantip.com/topic/35244410
ส่วนวันนี้จะมาสร้างอุปกรณ์ขับตามดาวแบบ Barndoor แบบง่ายสุดติ่ง
ก่อนอื่นขอโม้ก่อน


อ่านเลขเป็นก็ทำได้แล้วมั้ง

ตัวอุปกรณ์ Barndoor มักถูกดูถูกว่าเป็นอุปกรณ์ ที่ถ่าย DSO ไม่ได้หรอก ก็แล้วแต่คนนะ หากคิดว่ามันทำได้ และพยายามทำมันให้ได้มันย่อมทำได้
หลายคนเห็นอุปกรณ์ทดลองตามดาวของผมแล้วยิ้มขำก็มี แต่ในความเป็นจริงนั้นการถ่าย DSO นั้นผมประมาณว่า 50% ขึ้นกับสภาพแวดล้อมและท้องฟ้า 30% ขึ้นกับเทคนิคผู้ถ่ายในการแก้ปัญหา อีก 20% คือตัวตามดาว เพราะในความเป็นจริงเราให้ตามให้ตรงแค่ 30 วินาทีเราก็ถ่าย DSO ได้แล้ว









เอาเป็นว่าไอ้รูปข้างบนทั้งหมดถ่ายมาจาก barndoor ซึ่งจริงๆก็ทำได้ไม่ยากเท่าไรนัก

เข้าเรื่องดีกว่า

จากกระทู้การสร้างตามดาวด้วยตัวเองแล้ว มีบางท่านอาจอยากจะต่อมอเตอร์ให้หมุนแทนมือ ซึ่งจะสะดวกและแม่นยำขึ้นมาก และสามารถต่อเลนส์เทเลได้ช่วงมากขึ้น ทำให้ไม่จำกัดแค่การถ่ายทางช้างเผือก
โดยกระทู้นี้จะมาแนะนำวิธีการง่ายๆสุดๆในการควบคุมมอเตอร์และทำได้ในไม่กี่นาที หากชำนาญก็นาทีเดียว
อนึ่งหากทำตามดาวด้วยมอเตอร์ ตัว Barndoor ควรยาว กว่าแบบใช้มือหมุนเองนะครับ แล้วเอามอเตอร์มาไว้ทางปลายๆตรงข้ามด้านบานพับ เพราะว่ามอเตอร์แรงมันไม่มากมันจะได้ยกกล้องไหว ปกติรับน้ำหนักกล้องได้ 2-3 กิโลครับ ซึ่งต่างกับการเอามือหมุนเองอันนั้นไม่ต้องกังวลเพราะแรงมือบิดมันเยอะมากกว่ามาก ความยาวที่เหมาะสมคือ 170-200 มม
ส่วน ตามดาว แบบ Barndoor ใช้ Motor นี่แบบเยอะเลยในเนตหาเอาครับ ชอบแบบไหนทำตามนั้นเลย
(ก่อนหน้านั้นเคยใช้วงจรไฟฟ้าซึ่งอันนั้นข้อดีคือแม่นมาก ละเอียดมาก เร่งได้เร็วมาก แต่ข้อเสียคือยุ่งยาก และใช้ความรู้มาก หากทำตามกระทู้นี้จะง่ายกว่า แต่เหมาะกับ barndoor ครับ)
อุปกรณ์ที่มีคือ
1 MCU Arduino UNO R3
2 Step motor + Driver เอาแบบในรูปนะครับเดี๋ยวเสียบไม่ได้
3 สายไฟ Dupont Female-Male 4 เส้น
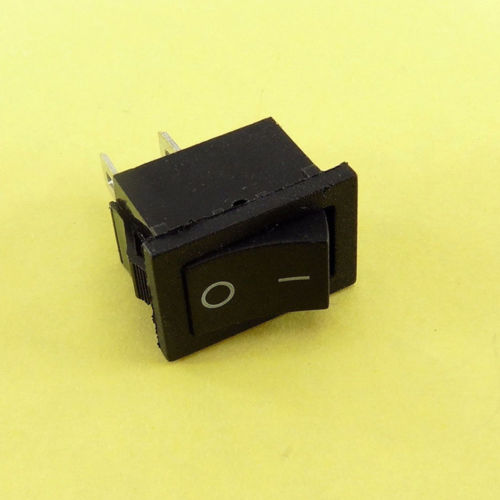
4 สวิทช์
มาดูอุปกรณ์ทีละตัวครับ (ต้องขออภัยหากรูปใหญ่มาก เพราะต้องการให้เห็นขาและเลขชัดๆ)
1 Arduino Uno R3 เพราะ สะดวกเวลาทดลอง ต่อไฟ การ Load โปรแกรม แต่อาจใหญ่หน่อย

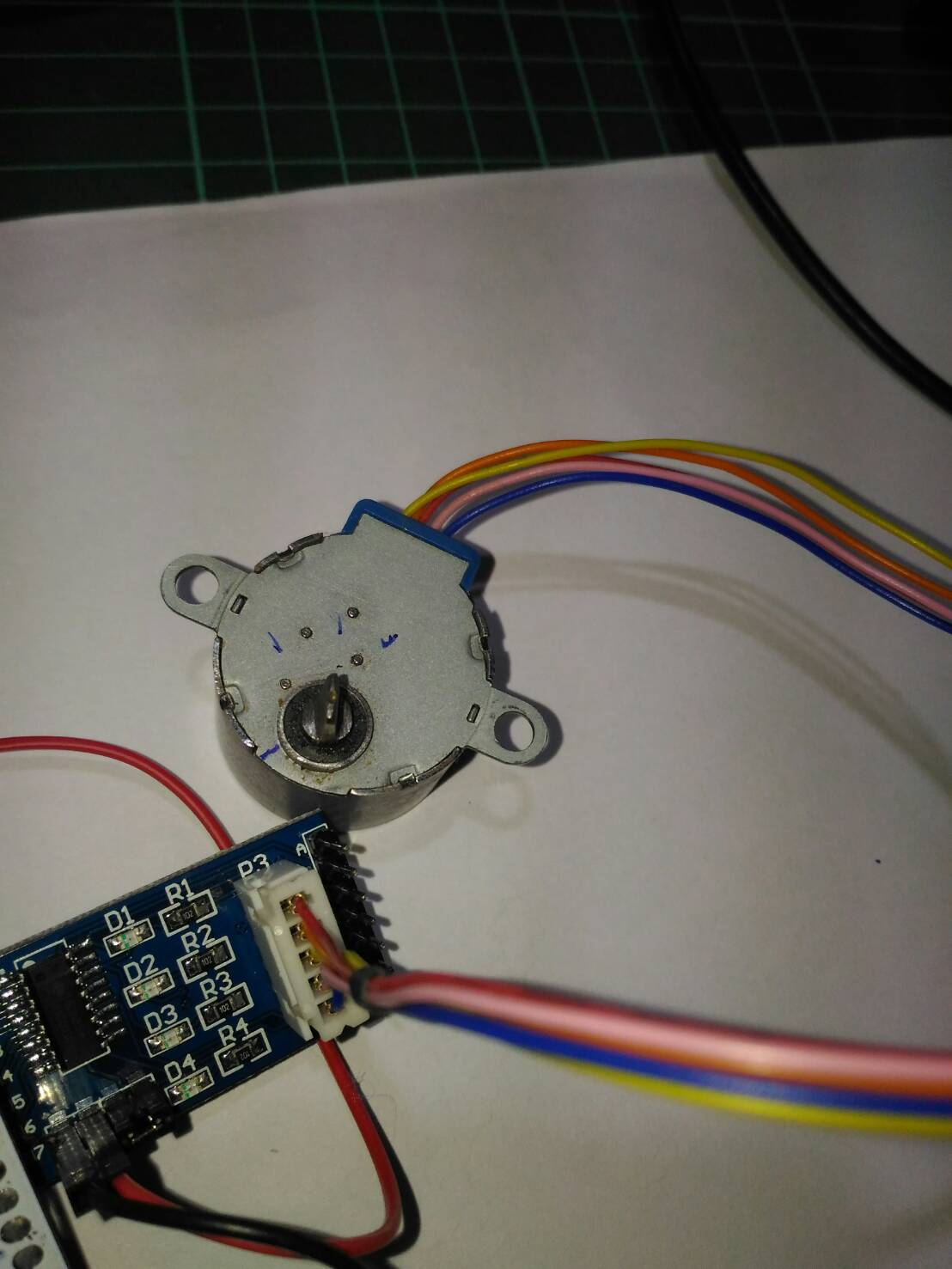
 2 Motor 28BYJ-48 5V + Driver
2 Motor 28BYJ-48 5V + Driver หาได้ทั่วไปโดยเฉพาะใน Ebay ตัวขา pin ให้ชี้ขึ้นแบบในรูปนะจะได้เหมือนกัน

 3 สาย Dupont Female-Male
3 สาย Dupont Female-Male
 4 สวิทช์เปิด-ปิด
4 สวิทช์เปิด-ปิด
 เริ่มสร้าง
เริ่มสร้าง
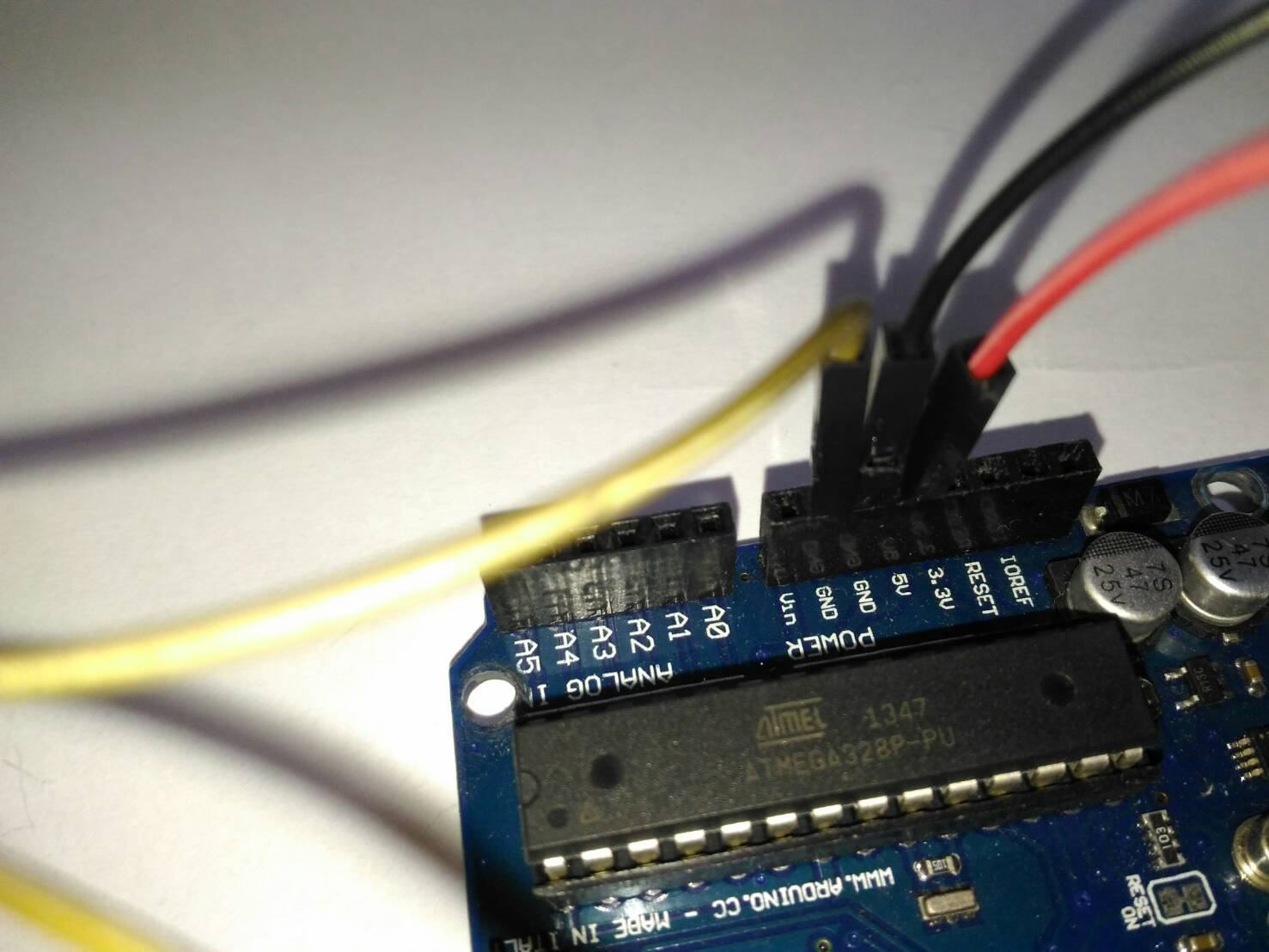
1) มาดูที่ MCU (Microcontroller Unit)
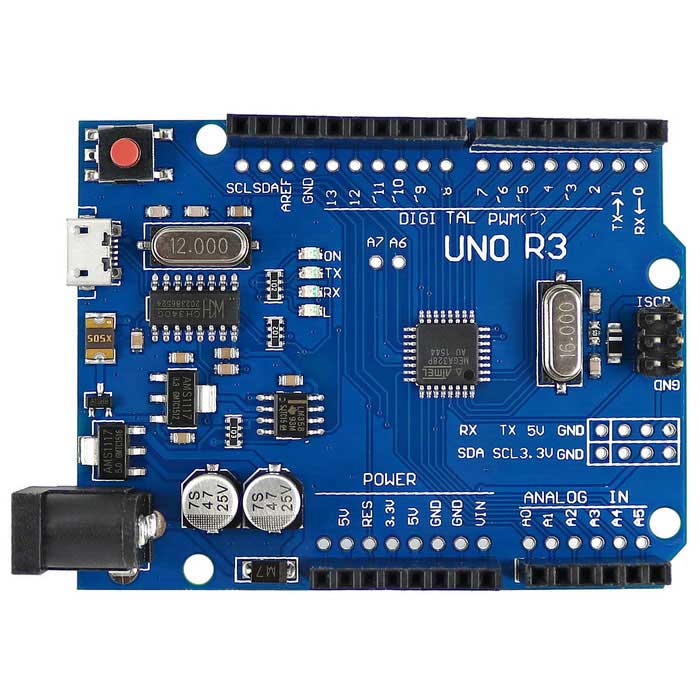
จะมีตัวเลขกำกับไว้ 0-13 คือ Digital Pin
อีกด้านเป็น Power
5V คือ MCU จะจ่ายไฟออกมา 5 V คงที่
GND คือขั้วลบ
Vin ใช้จ่ายไฟเข้าแต่เราจะไม่ใช้ (เหมือนปลั๊กกลมดำด้านซ้ายล่าง)
อ่านไม่เข้าใจไม่เป็นไรจำตัวเลข ตัวหนังสือ ก็พอ
2) ดูที่ Driver

จะมี IN1 IN2 ...... IN
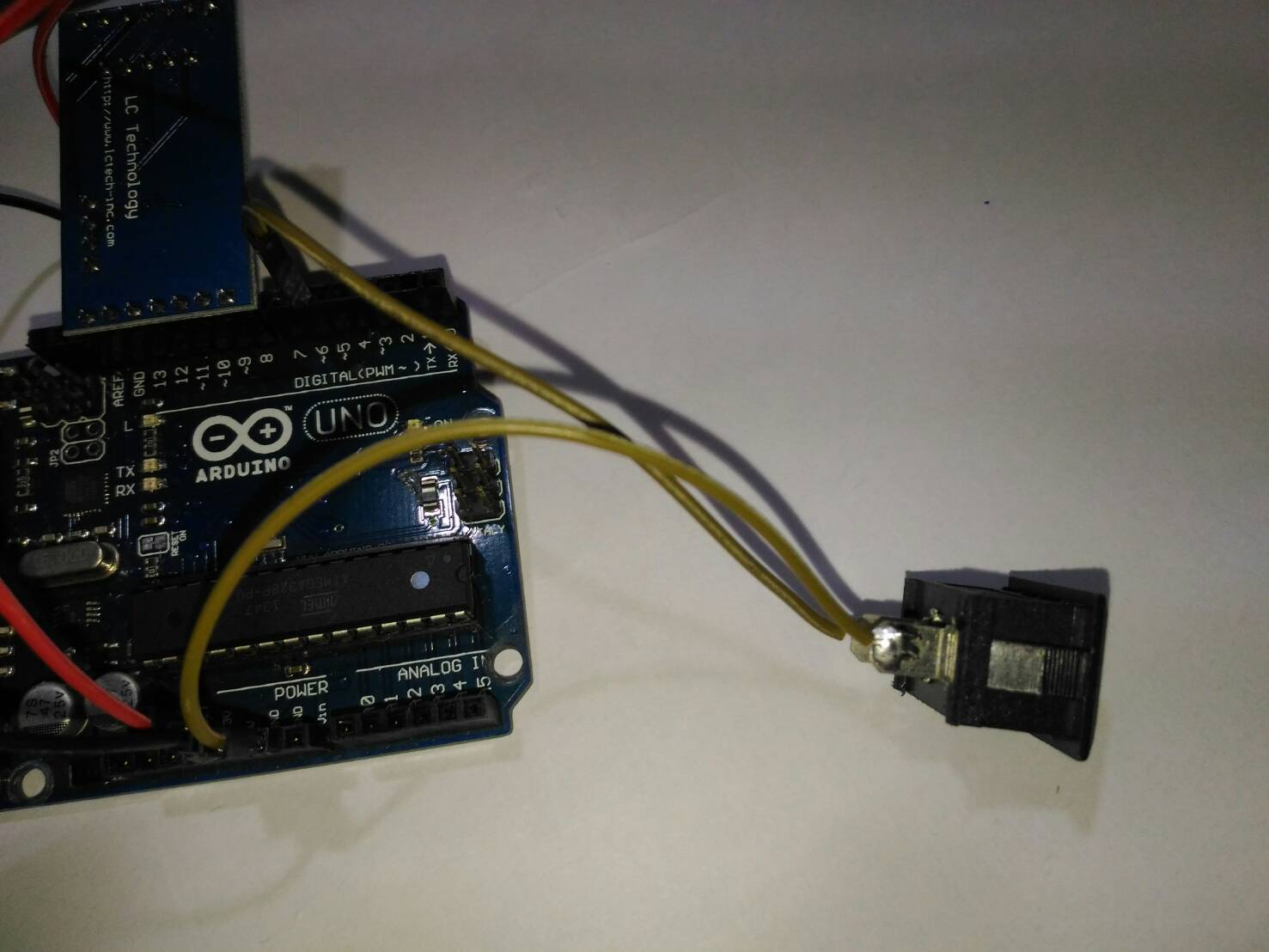
3) ตัดสาย Dupont 2 เส้นเอาเฉพาะด้าน ตัวผู้ เชื่อมกับสวิทช์ดังรูป

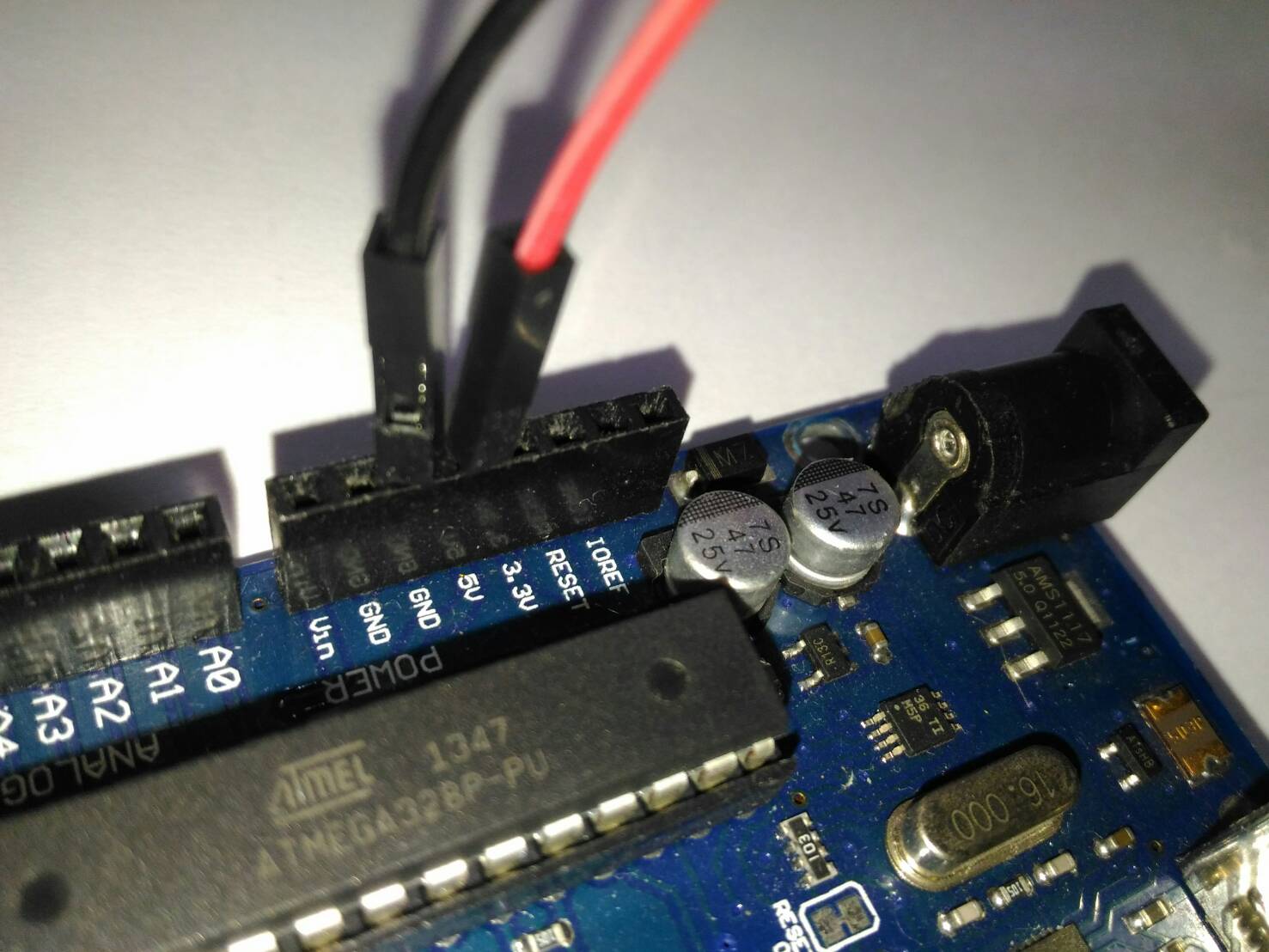
4) เชื่อมสาย ระหว่าง MCU กับ Driver ดังนี้
MCU ---> Driver
8 ----> IN1
9 ---> IN2
10 ---> IN3
11 ---> IN4
12 ---> IN5
13 ---> IN6
GND ---> IN7
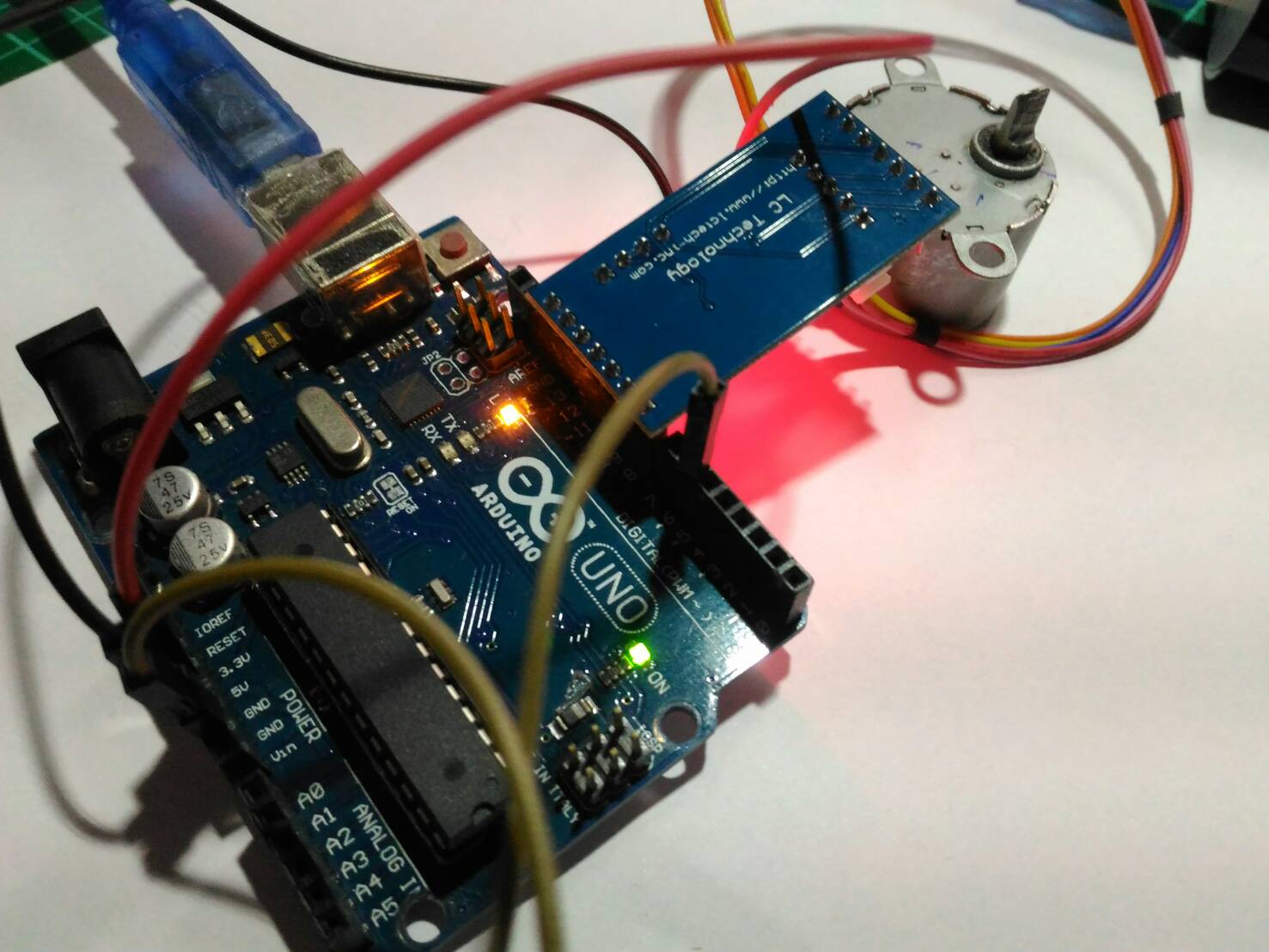
ทำโดยเสียบลงไปเลย ไม่ต้องมีสายอะไร ตามรูป

5) ต่อเพิ่ม
5V --> Vcc
GND ->GND

6) ต่อสวิทช์
6 > สายแรกอันไหนก็ได้
GND > สายที่เหลือ

7) เสียบ Motor
เสร็จละเห็นไหมต่อนาทีเดียวมั้ง


ยังใช้ไม่ได้ต้องลงโปรแกรม
-----------------------------------------------------------------------------------
ต่อไปลงโปรแกรม จาก link
https://www.arduino.cc/en/Main/Software
load Arduino 1.8.3 มาลงให้เรียบร้อยในเครื่องคอมของเรา
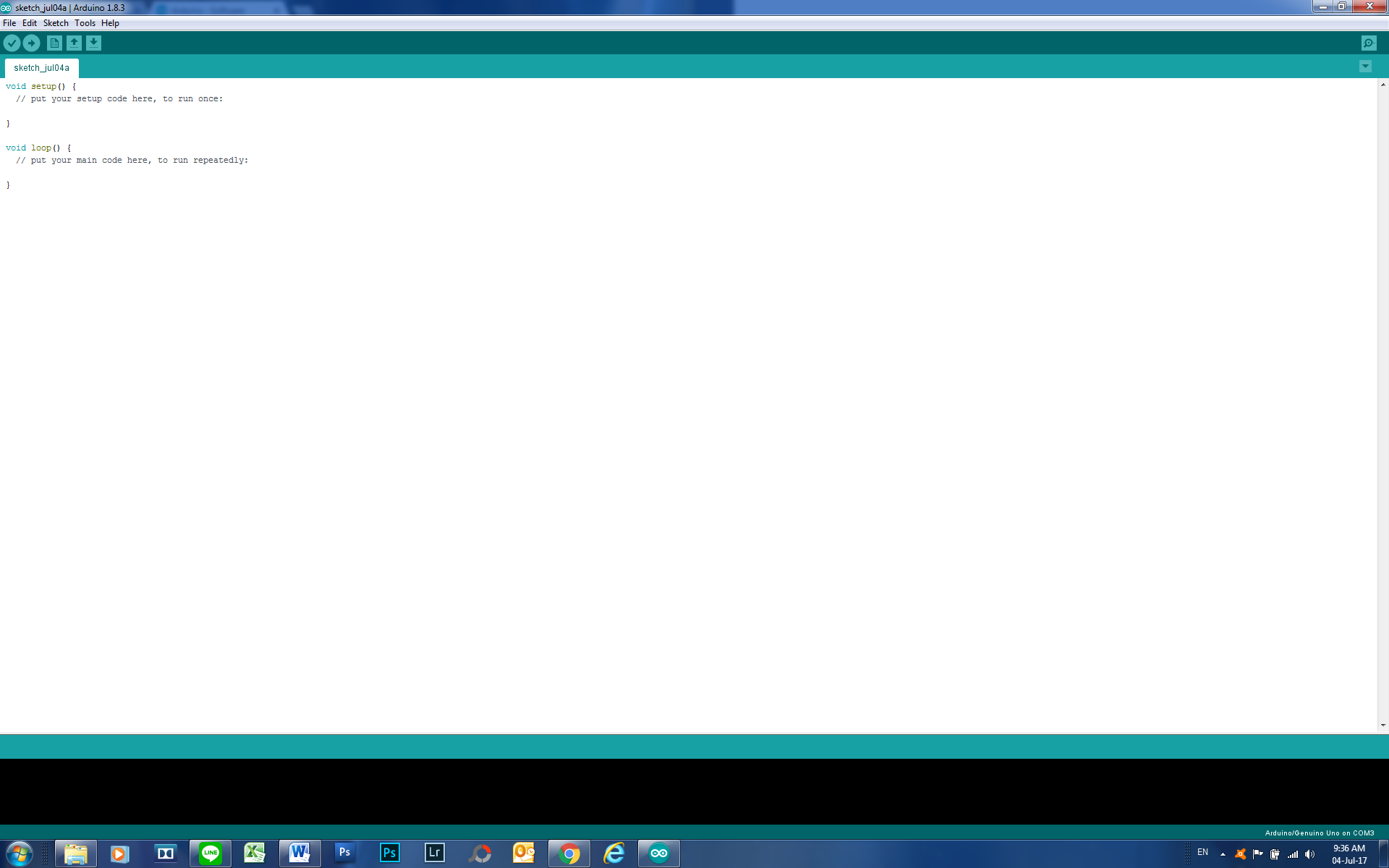
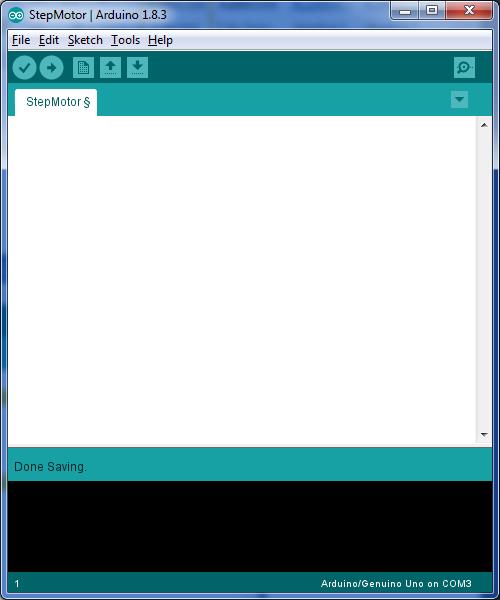
File > New
Save อีกทีชื่ออะไรก็ได้ เช่น StepMotor

ลบที่พิมพ์ไว้ทิ้งให้หมด
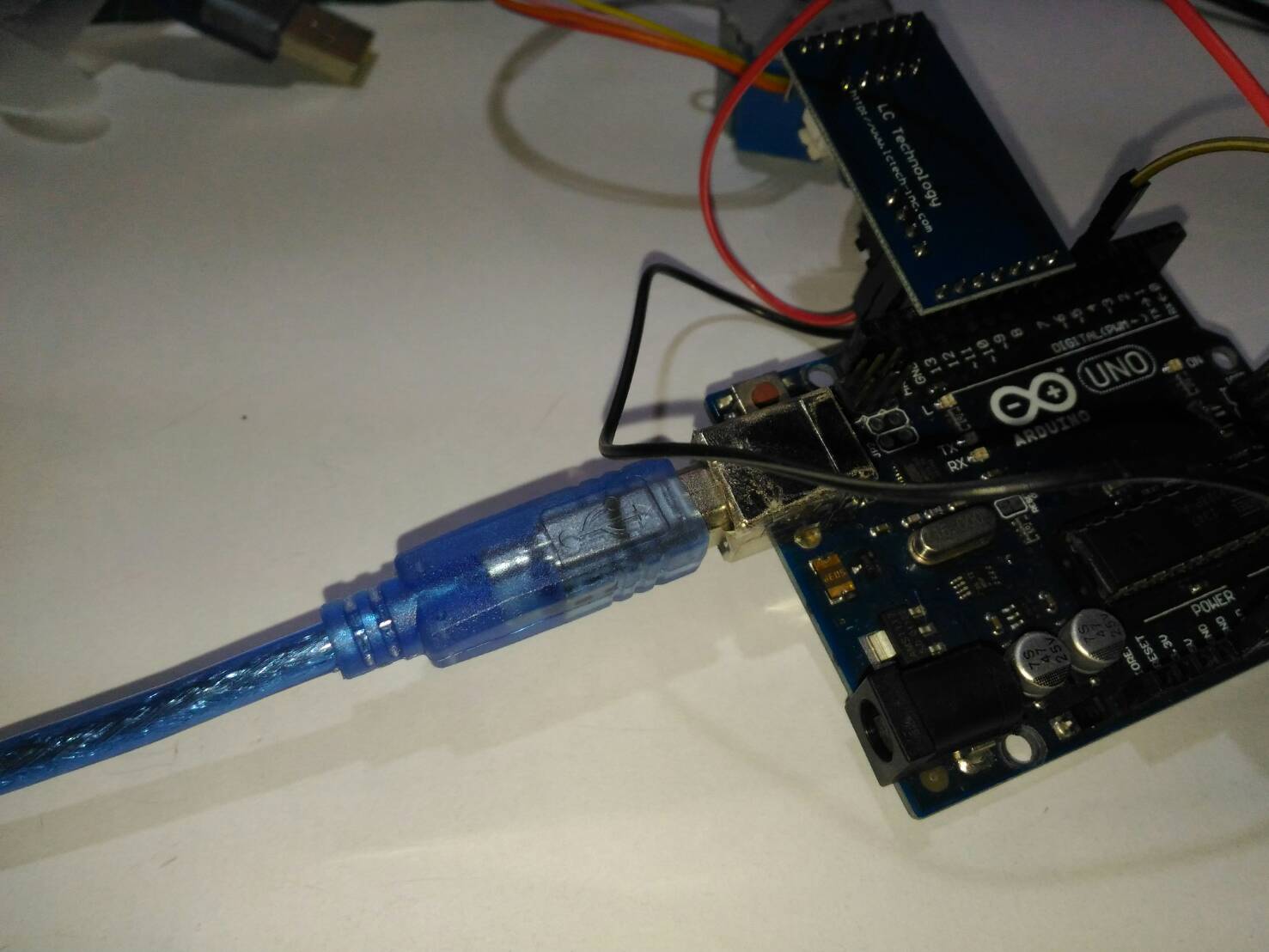
เสียบสาย USB จาก MCU ไปคอม
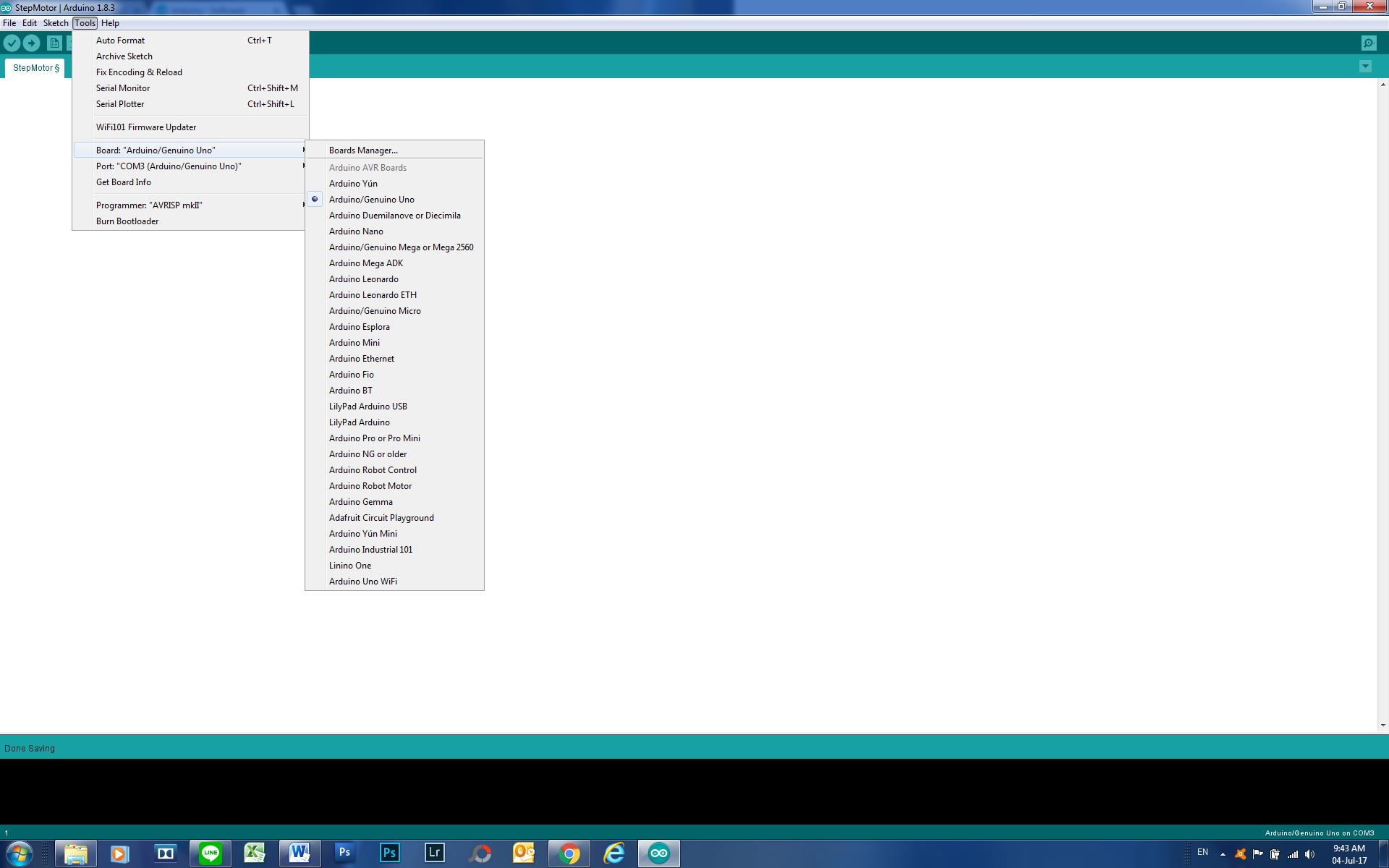
ไปที่ Tool เลือก Board เป็น Arduino/Geuino Uno
ไปที่ tool > port เลือก port ที่ปรากฏ อาจเป็น COM1 COM2 COM3 ... หากไม่เห็นออกมาจกเมนูรอซักครู่เข้าใหม่
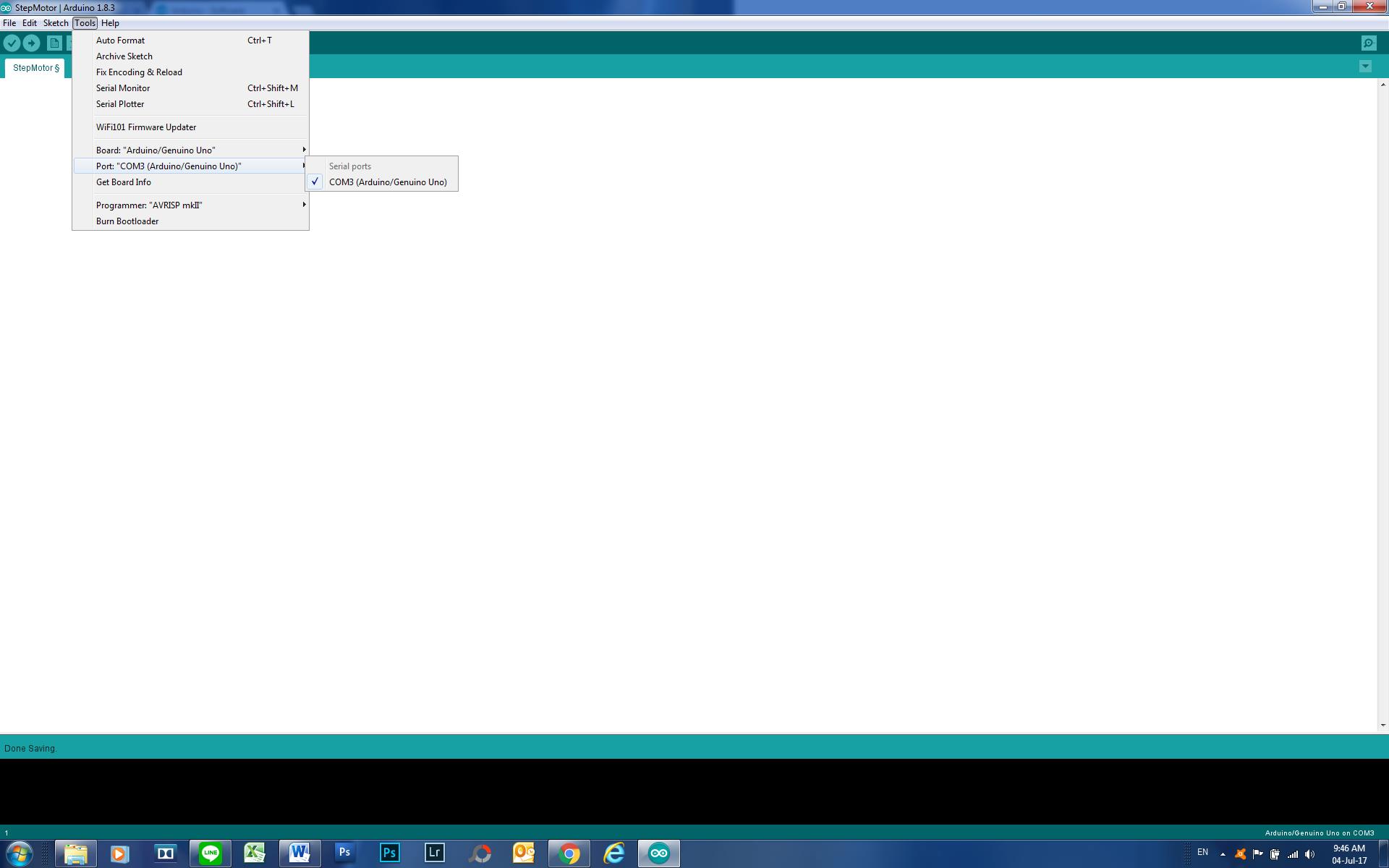
หากไม่มีลองเสียบ USB ช่องอื่น หากไม่มีอีกปิดโปรแกรมเปิดใหม่ หากไม่มีอีกให้ปิดเครื่องเปิดใหม่
Copy ตัวอย่างนี้ใส่ใน โปรแกรม
//***********************************************************************************
byte MotorPin1 = 8; // Step Motor Driver pin 1
byte MotorPin2 = 9; // Step Motor Driver pin 2
byte MotorPin3 = 10; // Step Motor Driver pin 3
byte MotorPin4 = 11; // Step Motor Driver pin 4
byte SW1 = 6; // Switch motor direction
byte LedPin = 13; // Led
int xdelay = 30; //เวลาหน่วงมอเตอร์ ความเร็วรอบมอเตอร์ ค่ายิ่งน้อยยิ่งเร็ว มีค่าเป็น milisec
int rdelay = 3; //เวลาหน่วงมอเตอรตอนย้อนกลับ์ ความเร็วรอบมอเตอร์ ค่ายิ่งน้อยยิ่งเร็ว มีค่าเป็น milisec
void RotateMotorUp()
{
digitalWrite(LedPin, HIGH); //
digitalWrite(MotorPin1, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin1, LOW); // LED off
digitalWrite(MotorPin2, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin2, LOW); // LED off
digitalWrite(LedPin, LOW); //
digitalWrite(MotorPin3, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin3, LOW); // LED off
digitalWrite(MotorPin4, HIGH); // LED on
delay(xdelay); // waits for a second
}
void RotateMotorDw()
{
digitalWrite(LedPin, HIGH); //
digitalWrite(MotorPin4, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin4, LOW); // LED off
digitalWrite(MotorPin3, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin3, LOW); // LED off
digitalWrite(MotorPin2, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin2, LOW); // LED off
digitalWrite(MotorPin1, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin1, LOW); // LED off
}
void setup()
{
pinMode(MotorPin1, OUTPUT); // sets as output
pinMode(MotorPin2, OUTPUT); // sets as output
pinMode(MotorPin3, OUTPUT); // sets as output
pinMode(MotorPin4, OUTPUT); // sets as output
pinMode(LedPin, OUTPUT); // sets as output
pinMode(SW1, INPUT_PULLUP); // sets as Input
digitalWrite(LedPin, LOW); //
}
void loop()
{
if (digitalRead(SW1))
{
RotateMotorUp();
}
else
{ RotateMotorDw();
}
}
//**********************************************************************
กดที่รูป ->

ด้านซ้ายบน รอจนโปรแกรม upload เสร็จ
จะเห็นไฟกระพริบที่ driver
ลองเปลี่ยนค่า xdelay=20; เป็นค่าอื่นๆแล้วกดลูกศร upload โปรแกรมดูจะเห็นว่าการกระพริบของหลอด LED มันจะเปลี่ยน
(ค่า 1-100) หาก barndoor ยาว 175 mm ค่าประมาณ 30
เสียบ Motor เข้าไป (หมายเหตุใช้กับมอเตอร์แบบที่บอกเท่านั้นหากแบบอื่นต้องต่อไฟเลี้ยงจากที่อื่นไฟ 5V จากบอร์ดจ่ายไม่ไหว)
เสร็จแล้ว ทีนี้ก็เอามอเตอร์ไปต่อตามดาวได้เลยครับ
ก็หวังว่าคงได้ประโยชน์บ้างครับ

หมายเหตุ
- ค่า xdelay แก้ไขค่านี้ตอนทดลองกับตามดาวจริง ลองต่อกับคอมก่อนแล้วเปลี่ยนค่า x ถ่ายไปซัก 1-2 นาทีแล้วดูดาวยืดไหมหากยืดปรับค่ามากขึ้นหรือลดลงแล้วดูว่าดีขึ้นไหมครับ
- สวิทช์ สลับทิศทางหมุนมอเตอร์ พอหมุนไปซักพักก็ต้องถอยกลับมาคั้งต้นใหม่
- rdelay เอาไว้ตอนถอยต้องให้เร็วๆ 3-4 แต่น้อยกว่าหรือมากกว่าก็ได้แต่หากน้อยมากๆมอเตอร์หมุนไม่ทันมันจะไม่หมุนแต่คราง อือๆๆๆ
- Upload โปรแกรมแล้วถอดออกจาก คอมพิวเตอร์ ต่อสาย USB กับ Power bank ได้เลย
- หากพบว่าการหมุนไปกลับ มันสลับทิศทางกับ barndoor เราก็ไม่ต้องตกใจแค่ใส่ค่า xdelay กับ rdelay สลับกันก็ใช้ได้แล้ว
- อนึ่งหากใครซื้อตัว driver แล้วดันซื้อผิดเป็น pin ด้านล่างแบบดังรูปอย่าเสียบให้ติดต่อหลังไมค์
- ค่า xdelay นี่จริงๆมาจากการคำนวนครับหากไปอ่านกระทู้เก่าที่เขียนไว้จะเข้าใจว่าเราต้องหมุนกี่องศาในเวลาเท่าไร ซึ่งสามารถคำนวนกลับมาเป็นคาบเวลาครับ หากขี้เกียจคำนวนก็เดาเอา ควรทำครั้งแรกที่บ้านครับลองจนได้ค่า xdelay ที่ถูกต้องแล้วเขียนติดไว้ แก้ในโปรแกรม มันจะเป็นค่าเฉพาะของ barndoor ตัวนั้น
การต่อที่ดีกว่าสามารถดูในความคิดเห็น 3 ของกระทู้นี้ครับ
https://ppantip.com/topic/37582920/comment3

สร้างวงจรขับมอเตอร์ตามดาวแบบ Barn door ในสิบนาที
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #1
http://ppantip.com/topic/35228265
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #2
http://ppantip.com/topic/35233329
การสร้างอุปกรณ์ตามดาวด้วยตัวเอง DIY star tracking #3
http://ppantip.com/topic/35237413
การสร้างวงจรขับ motor สำหรับ การถ่ายภาพดาราศาสตร์,high accuracy motor driver for star tracker
http://ppantip.com/topic/35222366
การใช้งานวงจรขับ และอุปกรณ์ตามดาวแบบติดมอเตอร์เบื้องต้น Basic Motor Drive Barn Door Tracker
http://ppantip.com/topic/35244410
ส่วนวันนี้จะมาสร้างอุปกรณ์ขับตามดาวแบบ Barndoor แบบง่ายสุดติ่ง
ก่อนอื่นขอโม้ก่อน
ตัวอุปกรณ์ Barndoor มักถูกดูถูกว่าเป็นอุปกรณ์ ที่ถ่าย DSO ไม่ได้หรอก ก็แล้วแต่คนนะ หากคิดว่ามันทำได้ และพยายามทำมันให้ได้มันย่อมทำได้
หลายคนเห็นอุปกรณ์ทดลองตามดาวของผมแล้วยิ้มขำก็มี แต่ในความเป็นจริงนั้นการถ่าย DSO นั้นผมประมาณว่า 50% ขึ้นกับสภาพแวดล้อมและท้องฟ้า 30% ขึ้นกับเทคนิคผู้ถ่ายในการแก้ปัญหา อีก 20% คือตัวตามดาว เพราะในความเป็นจริงเราให้ตามให้ตรงแค่ 30 วินาทีเราก็ถ่าย DSO ได้แล้ว
เข้าเรื่องดีกว่า
จากกระทู้การสร้างตามดาวด้วยตัวเองแล้ว มีบางท่านอาจอยากจะต่อมอเตอร์ให้หมุนแทนมือ ซึ่งจะสะดวกและแม่นยำขึ้นมาก และสามารถต่อเลนส์เทเลได้ช่วงมากขึ้น ทำให้ไม่จำกัดแค่การถ่ายทางช้างเผือก
โดยกระทู้นี้จะมาแนะนำวิธีการง่ายๆสุดๆในการควบคุมมอเตอร์และทำได้ในไม่กี่นาที หากชำนาญก็นาทีเดียว
อนึ่งหากทำตามดาวด้วยมอเตอร์ ตัว Barndoor ควรยาว กว่าแบบใช้มือหมุนเองนะครับ แล้วเอามอเตอร์มาไว้ทางปลายๆตรงข้ามด้านบานพับ เพราะว่ามอเตอร์แรงมันไม่มากมันจะได้ยกกล้องไหว ปกติรับน้ำหนักกล้องได้ 2-3 กิโลครับ ซึ่งต่างกับการเอามือหมุนเองอันนั้นไม่ต้องกังวลเพราะแรงมือบิดมันเยอะมากกว่ามาก ความยาวที่เหมาะสมคือ 170-200 มม
ส่วน ตามดาว แบบ Barndoor ใช้ Motor นี่แบบเยอะเลยในเนตหาเอาครับ ชอบแบบไหนทำตามนั้นเลย
(ก่อนหน้านั้นเคยใช้วงจรไฟฟ้าซึ่งอันนั้นข้อดีคือแม่นมาก ละเอียดมาก เร่งได้เร็วมาก แต่ข้อเสียคือยุ่งยาก และใช้ความรู้มาก หากทำตามกระทู้นี้จะง่ายกว่า แต่เหมาะกับ barndoor ครับ)
อุปกรณ์ที่มีคือ
1 MCU Arduino UNO R3
2 Step motor + Driver เอาแบบในรูปนะครับเดี๋ยวเสียบไม่ได้
3 สายไฟ Dupont Female-Male 4 เส้น
4 สวิทช์
มาดูอุปกรณ์ทีละตัวครับ (ต้องขออภัยหากรูปใหญ่มาก เพราะต้องการให้เห็นขาและเลขชัดๆ)
1 Arduino Uno R3 เพราะ สะดวกเวลาทดลอง ต่อไฟ การ Load โปรแกรม แต่อาจใหญ่หน่อย
2 Motor 28BYJ-48 5V + Driver หาได้ทั่วไปโดยเฉพาะใน Ebay ตัวขา pin ให้ชี้ขึ้นแบบในรูปนะจะได้เหมือนกัน
3 สาย Dupont Female-Male
4 สวิทช์เปิด-ปิด
เริ่มสร้าง
1) มาดูที่ MCU (Microcontroller Unit)
จะมีตัวเลขกำกับไว้ 0-13 คือ Digital Pin
อีกด้านเป็น Power
5V คือ MCU จะจ่ายไฟออกมา 5 V คงที่
GND คือขั้วลบ
Vin ใช้จ่ายไฟเข้าแต่เราจะไม่ใช้ (เหมือนปลั๊กกลมดำด้านซ้ายล่าง)
อ่านไม่เข้าใจไม่เป็นไรจำตัวเลข ตัวหนังสือ ก็พอ
2) ดูที่ Driver
จะมี IN1 IN2 ...... IN
3) ตัดสาย Dupont 2 เส้นเอาเฉพาะด้าน ตัวผู้ เชื่อมกับสวิทช์ดังรูป
4) เชื่อมสาย ระหว่าง MCU กับ Driver ดังนี้
MCU ---> Driver
8 ----> IN1
9 ---> IN2
10 ---> IN3
11 ---> IN4
12 ---> IN5
13 ---> IN6
GND ---> IN7
ทำโดยเสียบลงไปเลย ไม่ต้องมีสายอะไร ตามรูป
5) ต่อเพิ่ม
5V --> Vcc
GND ->GND
6) ต่อสวิทช์
6 > สายแรกอันไหนก็ได้
GND > สายที่เหลือ
7) เสียบ Motor
ยังใช้ไม่ได้ต้องลงโปรแกรม
-----------------------------------------------------------------------------------
ต่อไปลงโปรแกรม จาก link
https://www.arduino.cc/en/Main/Software
load Arduino 1.8.3 มาลงให้เรียบร้อยในเครื่องคอมของเรา
Save อีกทีชื่ออะไรก็ได้ เช่น StepMotor
ลบที่พิมพ์ไว้ทิ้งให้หมด
เสียบสาย USB จาก MCU ไปคอม
Copy ตัวอย่างนี้ใส่ใน โปรแกรม
//***********************************************************************************
byte MotorPin1 = 8; // Step Motor Driver pin 1
byte MotorPin2 = 9; // Step Motor Driver pin 2
byte MotorPin3 = 10; // Step Motor Driver pin 3
byte MotorPin4 = 11; // Step Motor Driver pin 4
byte SW1 = 6; // Switch motor direction
byte LedPin = 13; // Led
int xdelay = 30; //เวลาหน่วงมอเตอร์ ความเร็วรอบมอเตอร์ ค่ายิ่งน้อยยิ่งเร็ว มีค่าเป็น milisec
int rdelay = 3; //เวลาหน่วงมอเตอรตอนย้อนกลับ์ ความเร็วรอบมอเตอร์ ค่ายิ่งน้อยยิ่งเร็ว มีค่าเป็น milisec
void RotateMotorUp()
{
digitalWrite(LedPin, HIGH); //
digitalWrite(MotorPin1, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin1, LOW); // LED off
digitalWrite(MotorPin2, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin2, LOW); // LED off
digitalWrite(LedPin, LOW); //
digitalWrite(MotorPin3, HIGH); // LED on
delay(xdelay); // waits for a second
digitalWrite(MotorPin3, LOW); // LED off
digitalWrite(MotorPin4, HIGH); // LED on
delay(xdelay); // waits for a second
}
void RotateMotorDw()
{
digitalWrite(LedPin, HIGH); //
digitalWrite(MotorPin4, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin4, LOW); // LED off
digitalWrite(MotorPin3, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin3, LOW); // LED off
digitalWrite(MotorPin2, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin2, LOW); // LED off
digitalWrite(MotorPin1, HIGH); // LED on
delay(rdelay); // waits for a second
digitalWrite(MotorPin1, LOW); // LED off
}
void setup()
{
pinMode(MotorPin1, OUTPUT); // sets as output
pinMode(MotorPin2, OUTPUT); // sets as output
pinMode(MotorPin3, OUTPUT); // sets as output
pinMode(MotorPin4, OUTPUT); // sets as output
pinMode(LedPin, OUTPUT); // sets as output
pinMode(SW1, INPUT_PULLUP); // sets as Input
digitalWrite(LedPin, LOW); //
}
void loop()
{
if (digitalRead(SW1))
{
RotateMotorUp();
}
else
{ RotateMotorDw();
}
}
//**********************************************************************
กดที่รูป ->
จะเห็นไฟกระพริบที่ driver
ลองเปลี่ยนค่า xdelay=20; เป็นค่าอื่นๆแล้วกดลูกศร upload โปรแกรมดูจะเห็นว่าการกระพริบของหลอด LED มันจะเปลี่ยน
(ค่า 1-100) หาก barndoor ยาว 175 mm ค่าประมาณ 30
เสียบ Motor เข้าไป (หมายเหตุใช้กับมอเตอร์แบบที่บอกเท่านั้นหากแบบอื่นต้องต่อไฟเลี้ยงจากที่อื่นไฟ 5V จากบอร์ดจ่ายไม่ไหว)
ก็หวังว่าคงได้ประโยชน์บ้างครับ
หมายเหตุ
- ค่า xdelay แก้ไขค่านี้ตอนทดลองกับตามดาวจริง ลองต่อกับคอมก่อนแล้วเปลี่ยนค่า x ถ่ายไปซัก 1-2 นาทีแล้วดูดาวยืดไหมหากยืดปรับค่ามากขึ้นหรือลดลงแล้วดูว่าดีขึ้นไหมครับ
- สวิทช์ สลับทิศทางหมุนมอเตอร์ พอหมุนไปซักพักก็ต้องถอยกลับมาคั้งต้นใหม่
- rdelay เอาไว้ตอนถอยต้องให้เร็วๆ 3-4 แต่น้อยกว่าหรือมากกว่าก็ได้แต่หากน้อยมากๆมอเตอร์หมุนไม่ทันมันจะไม่หมุนแต่คราง อือๆๆๆ
- Upload โปรแกรมแล้วถอดออกจาก คอมพิวเตอร์ ต่อสาย USB กับ Power bank ได้เลย
- หากพบว่าการหมุนไปกลับ มันสลับทิศทางกับ barndoor เราก็ไม่ต้องตกใจแค่ใส่ค่า xdelay กับ rdelay สลับกันก็ใช้ได้แล้ว
- อนึ่งหากใครซื้อตัว driver แล้วดันซื้อผิดเป็น pin ด้านล่างแบบดังรูปอย่าเสียบให้ติดต่อหลังไมค์
- ค่า xdelay นี่จริงๆมาจากการคำนวนครับหากไปอ่านกระทู้เก่าที่เขียนไว้จะเข้าใจว่าเราต้องหมุนกี่องศาในเวลาเท่าไร ซึ่งสามารถคำนวนกลับมาเป็นคาบเวลาครับ หากขี้เกียจคำนวนก็เดาเอา ควรทำครั้งแรกที่บ้านครับลองจนได้ค่า xdelay ที่ถูกต้องแล้วเขียนติดไว้ แก้ในโปรแกรม มันจะเป็นค่าเฉพาะของ barndoor ตัวนั้น
การต่อที่ดีกว่าสามารถดูในความคิดเห็น 3 ของกระทู้นี้ครับ
https://ppantip.com/topic/37582920/comment3