หมายเหตุ: Focuser ใช้กับ DLSR ไม่ได้หมายถึงระบบ Auto Focus ที่อยู่ในกล้อง DSLR นะครับ แต่คือการช่วย Manual Focus สำหรับเลนส์ ช่วยหมุนเพื่อลดการสั่นหากหมุนด้วยมือแแล้วภาพมันไหวที่เป็นปัญหาเวลาไปถ่ายดาว หากใครมาอ่านเรื่องการถ่ายภาพทั่วไปก็ข้ามกระทู้นี้ไปเลยครับ
สำหรับ Autofocuser
https://ppantip.com/topic/41740858
Motorize Focuser
กระทู้นี้จะมาแชร์วิธีการควบคุมมอเตอร์สำหรับเอาไปควบคุมการโฟกัสเลนส์กล้องกัน แต่ไม่ใช่การควบคุมการหมุนไปเรื่อยๆของมอเตอร์นะครับอย่าเข้าใจผิด
ปกติเวลาเราใช้งานกล้องดูดาวหรือเลนส์กล้องเราจะเริ่มมีปัญหาว่าถ้าที่ทางยาวโฟกัสสูงๆมากๆเป็นพันๆมิลลิเมตรนั้น เวลาเราหมุน Focuser นี่ภาพจะไหวมากๆจนตาลาย เราไม่รู้ว่ามันได้โฟกัสยังหรือเราไม่สามารถหมุนทีละนิดเป็น 1/1000 องศาได้มันจะวืดไปก็วืดมา และเป็นปัญหาของคนชอบส่องดาวยิ่งมีหลายๆคนส่องยิ่งเป็นปัญหาหนักเพราะแต่ละคนสายตาไม่เท่ากันต้องมาปรับใหม่ทุกครั้ง กว่าจะหมุนชัดได้เล่นเหงื่อตก เลยมีเพื่อนๆกันขอให้ช่วยแก้ปัญหาและทำอุปกรณ์มาหมุนแทนมือ แต่สิ่งที่ผมต้องแก้ปัญหาให้ก็คือ
1 ละเอียดและแม่นยำ ตามแต่ละเลนส์
2 ไม่วืดไปวืดมา
3 ตอบสนองมือได้เหมือนการหมุน Focuser เองโดยตรง
4 สามารถสลับระหว่าง Motor หรือเอามือหมุน Focuser ได้
5 สามารถเลื่อนเร็วๆได้และสามารถเลื่อนช้าๆก็ได้ ไม่อืดอาด
6 ปรับแต่งเองได้เหมาะสมกับอุปกรณ์ทุกอัน
หลังจากทำเสร็จก็ส่งไปให้เพื่อนลองใช้ก็เห็นว่าใช้งานได้ดี การจะเอาสิ่งนี้เก็บไว้แล้วทิ้งไปก็คงไม่มีประโยชน์เลยเอามาแชร์เผื่อใครจะเอาไปใช้คุมกล้องดูดาวหรือเลนส์กล้อง DSLR กระทู้นี้จะเขียนถึงแค่การสร้างวงจรและใช้งาน ส่วนการไปทำ Bracket ยึดหรือเอาไปยึดกล้องคงต้องไปหาวิธีเอาเองนะครับ และไม่คิดทำขายครับความขยันมันมีน้อย 55
ผู้ที่จะทำควรมีความรู้อิเล็คโทรนิกส์บ้างนะครับ
อุปกรณ์ที่ต้องมี
1 Arduino Nano Board

2 Switch กดติดปล่อยดับ 2 ตัว สองสี

3 Resister 1k 4 ตัว

4 LED 4 หลอด 4 สี
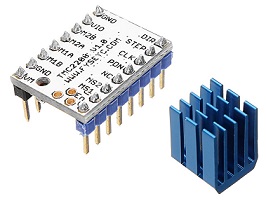
5 TMC 2208 Motor Driver
6 Capacitor 100uF 16V 1 ตัว

7 Box กล่องใส่
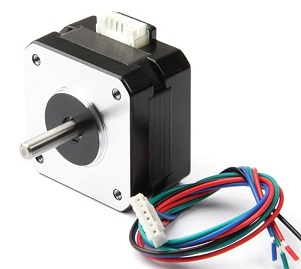
8 Step Motor Bipolar Nema17 แบบ Pancake แบนๆ หรือสเตปมอเตอร์ 2เฟสที่ไม่มี Gaer ทดและแรงบิดเยอะหน่อย
9 Board PCB สำเร็จรูป (Option) หรือ Breadboard สำหรับยึดอุปกรณ์ แล้วแต่จะ DIY เลยครับ
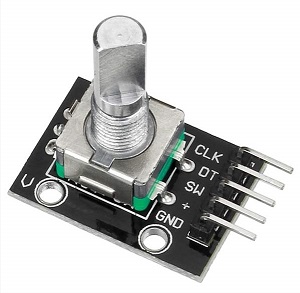
10 Rotary Encoder
11 Socket Header สำหรับเสียบขา Arduino และ Motor Driver (ถ้าใช้ Breadboard หรือเชื่อมสายตรงๆหรือใช้ สาย Dupont เสียบ ก็ไม่ต้องมี)

หลักการคือเมื่อเราหมุน Encoder ไป 1 Step ทางขวามอเตอร์ก็จะหมุนไปขวา 1 Step ถ้าหมุน 100 ก็ไปร้อย และทางตรงข้ามหากหมุนไปทางซ้ายก็ทำกลับกันเราจึงหมุนไปได้เรื่อยๆโดยไม่ต้องหยุดรอ การตอบสนองต่อการหมุนก็ขึ้นกับว่าเราจะตั้งให้มอเตอร์หน่วงเวลาเท่าไรแต่ก็จะมีค่าหนึ่งที่มอเตอร์ทำงานไม่ทันถ้าหมุนเร็วเกินไป ดังนั้นการใช้งานจึงไม่ต่างกับการหมุนเองตรงๆแต่ปรับความเร็วความละเอียดความแม่นยำได้และกล้องไม่สั่น
LED เป็นตัว Indicator สถานะการทำงานว่าอยู่ใน Mode ไหน
การต่ออุปกรณ์ก็จะเป็นไปตามตารางว่า Arduino ขาไหนต่อกับอะไร ขาไหน

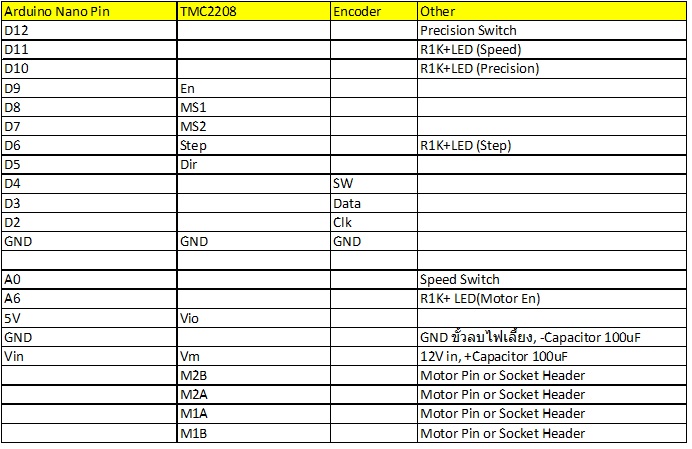
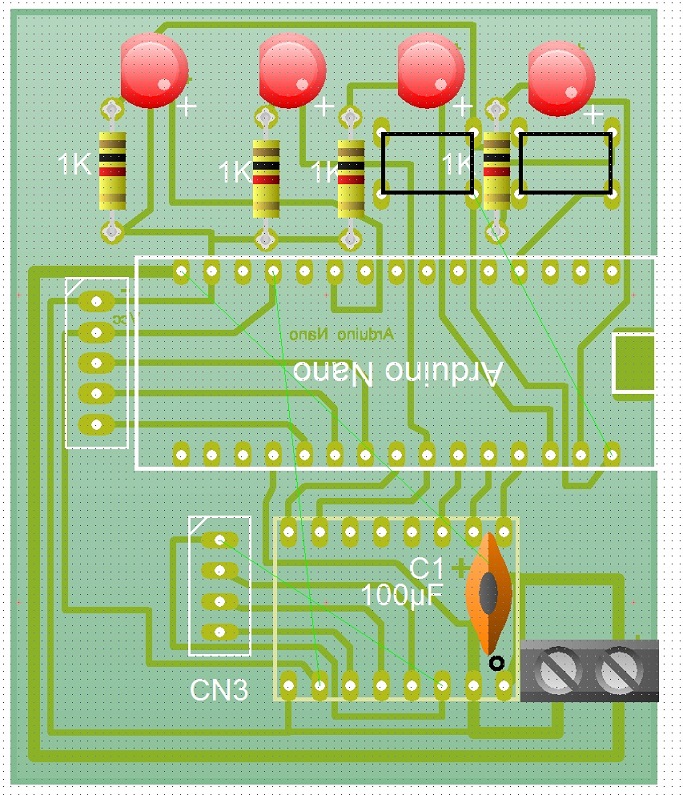
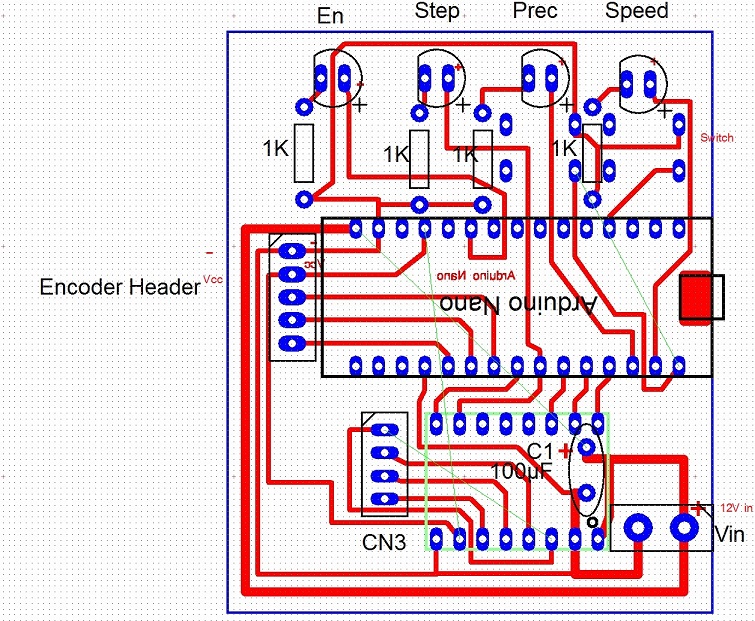
หรือถ้าจะเป็นวงจร pcb ก็ตามรูป Socket หลัง Arduino เอาไว้เสียบ Encoder ส่วน CN3 ไปต่อมอเตอร์เสียบไปกับสายมอเตอร์เลย ถ้าหมุนแล้วกลับด้านก็มากลับสายเสียบตรง CN3
TMC2208

การลง Arduino IDE ตาม link นี้
https://www.youtube.com/watch?v=4n5wm_pmb84&ab_channel=cyberticecybertice
Code เนื่องจากการแสดงผลในเวปจะแปลงบางคำสั่งใน Codeให้ผิดไปได้ หากจะทำ Inbox มาจะส่ง File ไปให้แทน

ทำ Motorize Focuser แบบ Manual สำหรับ กล้องดูดาวหรือ DSLR
สำหรับ Autofocuser
https://ppantip.com/topic/41740858
Motorize Focuser
กระทู้นี้จะมาแชร์วิธีการควบคุมมอเตอร์สำหรับเอาไปควบคุมการโฟกัสเลนส์กล้องกัน แต่ไม่ใช่การควบคุมการหมุนไปเรื่อยๆของมอเตอร์นะครับอย่าเข้าใจผิด
ปกติเวลาเราใช้งานกล้องดูดาวหรือเลนส์กล้องเราจะเริ่มมีปัญหาว่าถ้าที่ทางยาวโฟกัสสูงๆมากๆเป็นพันๆมิลลิเมตรนั้น เวลาเราหมุน Focuser นี่ภาพจะไหวมากๆจนตาลาย เราไม่รู้ว่ามันได้โฟกัสยังหรือเราไม่สามารถหมุนทีละนิดเป็น 1/1000 องศาได้มันจะวืดไปก็วืดมา และเป็นปัญหาของคนชอบส่องดาวยิ่งมีหลายๆคนส่องยิ่งเป็นปัญหาหนักเพราะแต่ละคนสายตาไม่เท่ากันต้องมาปรับใหม่ทุกครั้ง กว่าจะหมุนชัดได้เล่นเหงื่อตก เลยมีเพื่อนๆกันขอให้ช่วยแก้ปัญหาและทำอุปกรณ์มาหมุนแทนมือ แต่สิ่งที่ผมต้องแก้ปัญหาให้ก็คือ
1 ละเอียดและแม่นยำ ตามแต่ละเลนส์
2 ไม่วืดไปวืดมา
3 ตอบสนองมือได้เหมือนการหมุน Focuser เองโดยตรง
4 สามารถสลับระหว่าง Motor หรือเอามือหมุน Focuser ได้
5 สามารถเลื่อนเร็วๆได้และสามารถเลื่อนช้าๆก็ได้ ไม่อืดอาด
6 ปรับแต่งเองได้เหมาะสมกับอุปกรณ์ทุกอัน
หลังจากทำเสร็จก็ส่งไปให้เพื่อนลองใช้ก็เห็นว่าใช้งานได้ดี การจะเอาสิ่งนี้เก็บไว้แล้วทิ้งไปก็คงไม่มีประโยชน์เลยเอามาแชร์เผื่อใครจะเอาไปใช้คุมกล้องดูดาวหรือเลนส์กล้อง DSLR กระทู้นี้จะเขียนถึงแค่การสร้างวงจรและใช้งาน ส่วนการไปทำ Bracket ยึดหรือเอาไปยึดกล้องคงต้องไปหาวิธีเอาเองนะครับ และไม่คิดทำขายครับความขยันมันมีน้อย 55
ผู้ที่จะทำควรมีความรู้อิเล็คโทรนิกส์บ้างนะครับ
อุปกรณ์ที่ต้องมี
1 Arduino Nano Board
2 Switch กดติดปล่อยดับ 2 ตัว สองสี
3 Resister 1k 4 ตัว
4 LED 4 หลอด 4 สี
5 TMC 2208 Motor Driver
6 Capacitor 100uF 16V 1 ตัว
7 Box กล่องใส่
8 Step Motor Bipolar Nema17 แบบ Pancake แบนๆ หรือสเตปมอเตอร์ 2เฟสที่ไม่มี Gaer ทดและแรงบิดเยอะหน่อย
9 Board PCB สำเร็จรูป (Option) หรือ Breadboard สำหรับยึดอุปกรณ์ แล้วแต่จะ DIY เลยครับ
10 Rotary Encoder
11 Socket Header สำหรับเสียบขา Arduino และ Motor Driver (ถ้าใช้ Breadboard หรือเชื่อมสายตรงๆหรือใช้ สาย Dupont เสียบ ก็ไม่ต้องมี)
หลักการคือเมื่อเราหมุน Encoder ไป 1 Step ทางขวามอเตอร์ก็จะหมุนไปขวา 1 Step ถ้าหมุน 100 ก็ไปร้อย และทางตรงข้ามหากหมุนไปทางซ้ายก็ทำกลับกันเราจึงหมุนไปได้เรื่อยๆโดยไม่ต้องหยุดรอ การตอบสนองต่อการหมุนก็ขึ้นกับว่าเราจะตั้งให้มอเตอร์หน่วงเวลาเท่าไรแต่ก็จะมีค่าหนึ่งที่มอเตอร์ทำงานไม่ทันถ้าหมุนเร็วเกินไป ดังนั้นการใช้งานจึงไม่ต่างกับการหมุนเองตรงๆแต่ปรับความเร็วความละเอียดความแม่นยำได้และกล้องไม่สั่น
LED เป็นตัว Indicator สถานะการทำงานว่าอยู่ใน Mode ไหน
การต่ออุปกรณ์ก็จะเป็นไปตามตารางว่า Arduino ขาไหนต่อกับอะไร ขาไหน
หรือถ้าจะเป็นวงจร pcb ก็ตามรูป Socket หลัง Arduino เอาไว้เสียบ Encoder ส่วน CN3 ไปต่อมอเตอร์เสียบไปกับสายมอเตอร์เลย ถ้าหมุนแล้วกลับด้านก็มากลับสายเสียบตรง CN3
TMC2208
การลง Arduino IDE ตาม link นี้
https://www.youtube.com/watch?v=4n5wm_pmb84&ab_channel=cyberticecybertice
Code เนื่องจากการแสดงผลในเวปจะแปลงบางคำสั่งใน Codeให้ผิดไปได้ หากจะทำ Inbox มาจะส่ง File ไปให้แทน