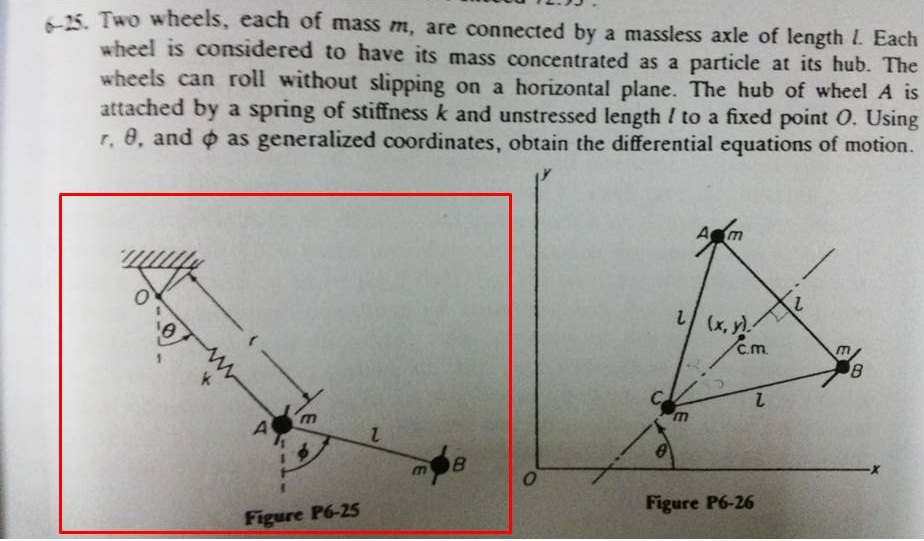
จากหนังสือ ''Principles of dynamics''
Donald T.Greenwood
จากโจทย์ Double pendulum ข้อนี้ ผมติดตรงเรื่องการหา Non-holonomic constraint ของระบบอย่างเดียวเลยครับ
เพื่อจะเอาไปเข้าLagrange multiplier สมการ kinetic และ potential ผมหาได้หมดแล้ว
ตอนนี้งงมากว่าจะหา Non-holonomic constraint ของระบบนี้ยังไง
มีใครพอทราบหรือชี้แนะ แนะนำอะไรได้มั้ยครับเกี่ยวกับการหาNon-holonomic หรือ Holonomic constraint
ปล.ตอนนี้มืดแปดด้านจริงๆ

อยากถามเรื่อง Non-holonomic constraint หน่อยครับ
จากหนังสือ ''Principles of dynamics'' Donald T.Greenwood
จากโจทย์ Double pendulum ข้อนี้ ผมติดตรงเรื่องการหา Non-holonomic constraint ของระบบอย่างเดียวเลยครับ
เพื่อจะเอาไปเข้าLagrange multiplier สมการ kinetic และ potential ผมหาได้หมดแล้ว
ตอนนี้งงมากว่าจะหา Non-holonomic constraint ของระบบนี้ยังไง
มีใครพอทราบหรือชี้แนะ แนะนำอะไรได้มั้ยครับเกี่ยวกับการหาNon-holonomic หรือ Holonomic constraint
ปล.ตอนนี้มืดแปดด้านจริงๆ